
















新闻中心


 您当前的位置:
您当前的位置: 发布时间:2024-08-26 05:42:09 浏览: 次
作者:韩信子@ShowMeAI
专栏:推荐与广告计算?http://www.showmeai.tech/tutorials/50
地址:ShowMeAI知识社区?
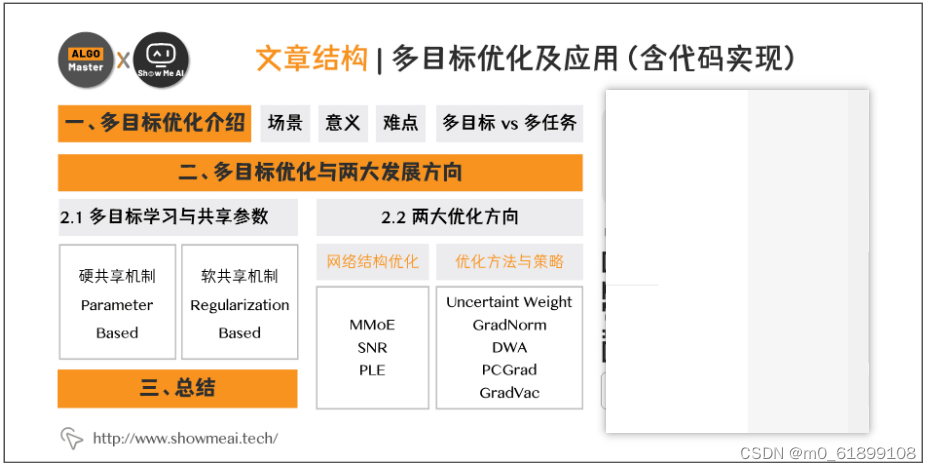
?推荐,搜索,计算广告是互联网公司最普及最容易商业变现的方向,也是算法发挥作用最大的一些方向,前沿算法的突破和应用可以极大程度驱动业务增长,这个系列咱们就聊聊这些业务方向的技术和企业实践。本期主题为多目标学习优化落地(附『实现代码』和『微信数据集』)
多目标排序是推荐排序系统中常见的技术实现,在很多推荐与排序常见中,有多个业务目标,找到一种综合排序方法使得多个目标都达到整体最优,能有最好的总体收益。
为什么需要多目标排序呢,在实际互联网的推荐系统产品中,大多数用户反馈都不是直接评分,而是各式各样的隐式反馈,比如说用户的点击、收藏、分享、观看时长、下单购买等。 在评估用户满意度与设定优化目标时,可能有一些偏差:
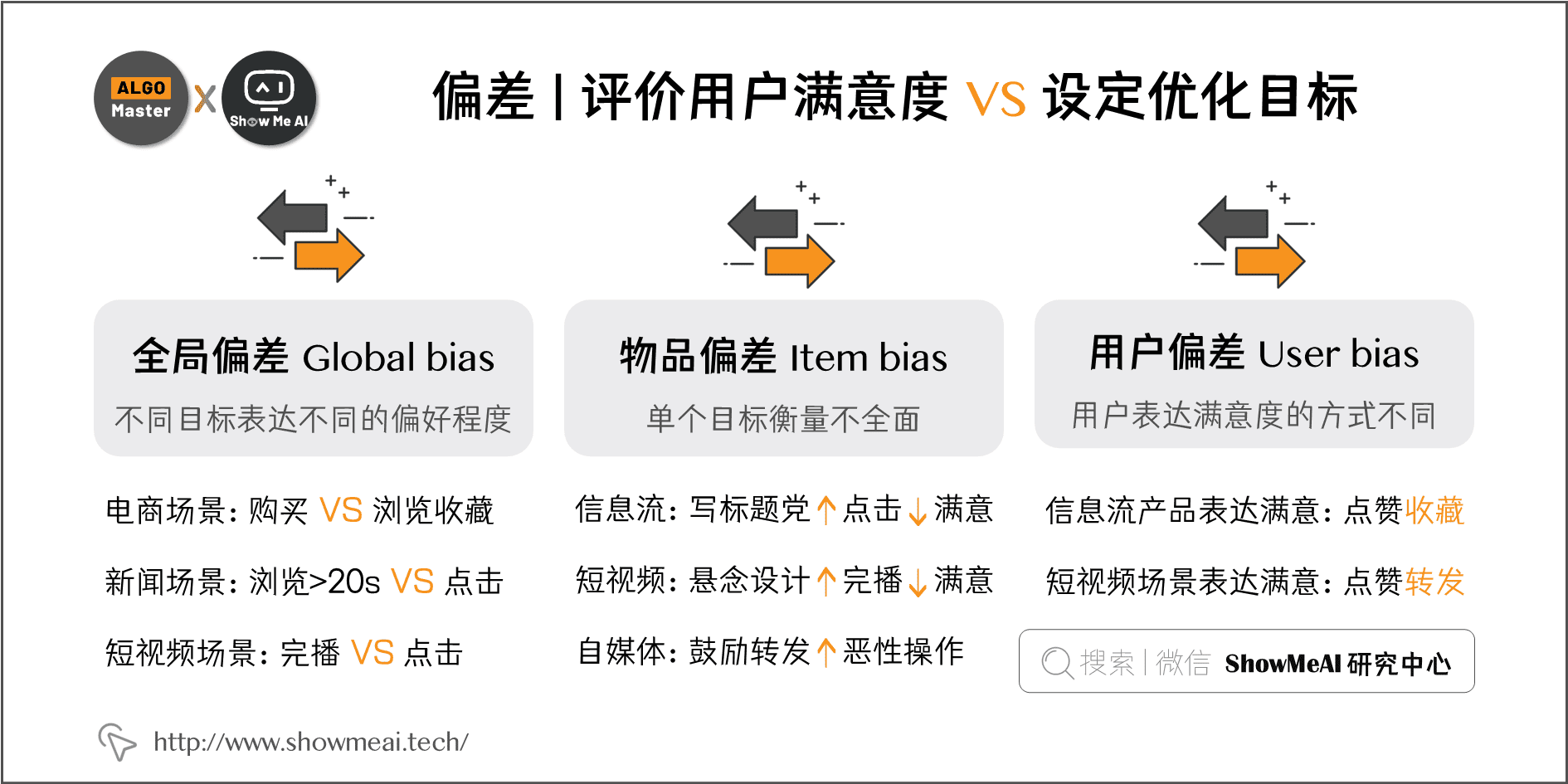
- 全局偏差/Global bias:不同目标表达不同的偏好程度。
- 电商场景中,购买行为表达的偏好高于点击浏览和收藏
- 新闻场景中,浏览时长超过20s这个行为表达的偏好高于点击
- 短视频场景,完播行为表达的偏好高于点击
- 物品偏差/Item bias:单个目标衡量不全面。
- 信息流产品中,标题党增加点击率,但降低满意度
- 短视频场景中,悬念设计提升完播率,但需要观看下一个引发用户更多操作的不满
- 自媒体资讯产品,鼓励转发率,可能会提升『转发保平安』等恶性操作
- 用户偏差/User bias:?户表达满意度的?式不同
- 信息流产品中,用户有 深度阅读、点赞、收藏 等不同表达满意的方式
- 短视频场景中,用户有 点赞、收藏、转发 等不同表达满意的方式
下图为部分互联网产品下,用户包含信息反馈的行为路径。
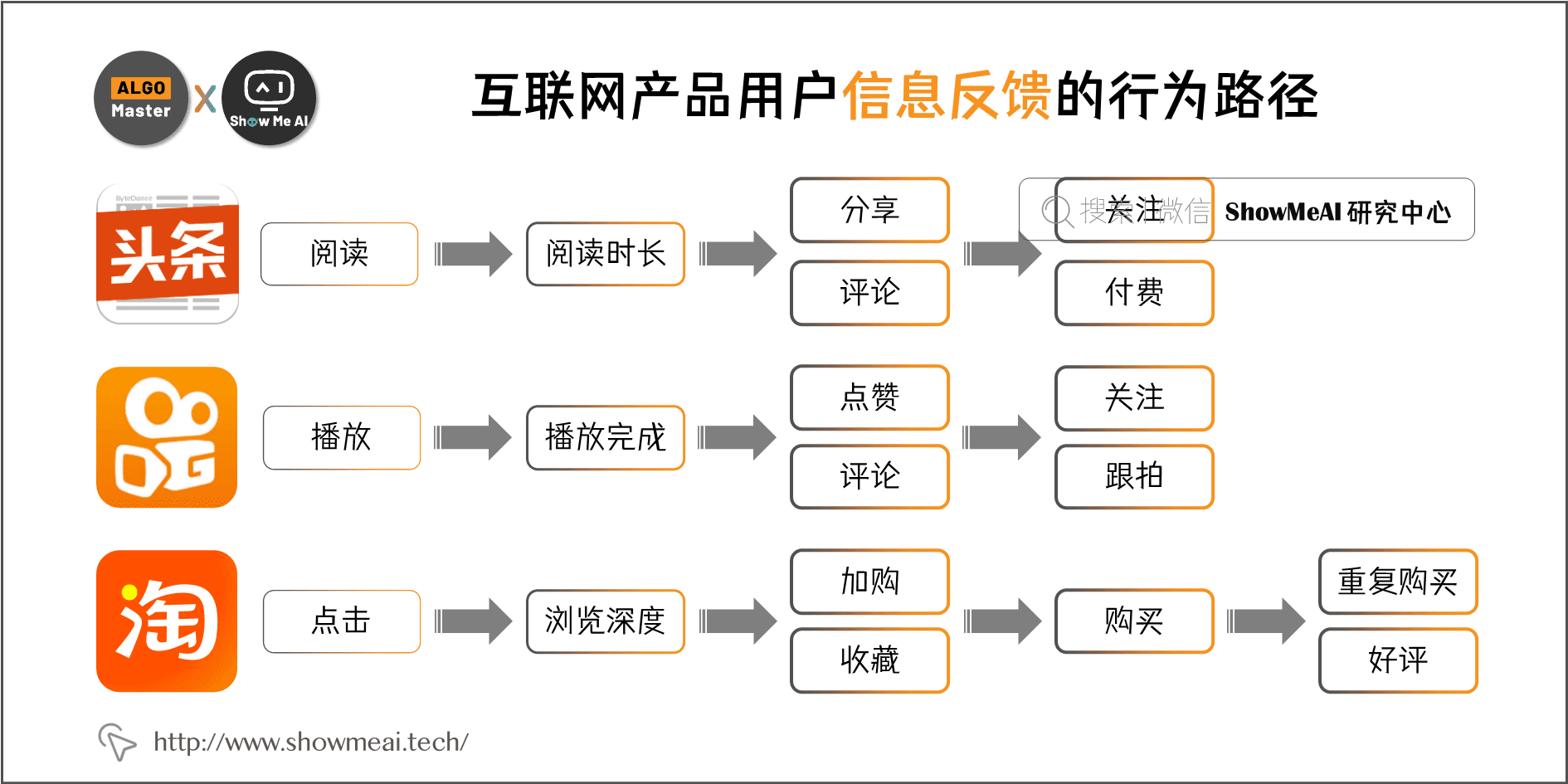
在上述众多互联网业务中,工程师优化和提升的目标可能是多个,比如,短视频推荐任务,既要点击率又要完播率;电商排序,既要点击率又要转化率。

多目标优化的主要技术实现是在推荐系统的『排序』环节完成,如下所示的信息流推荐中,排序环节影响最终展示结果,进而对目标效果影响最为直接。
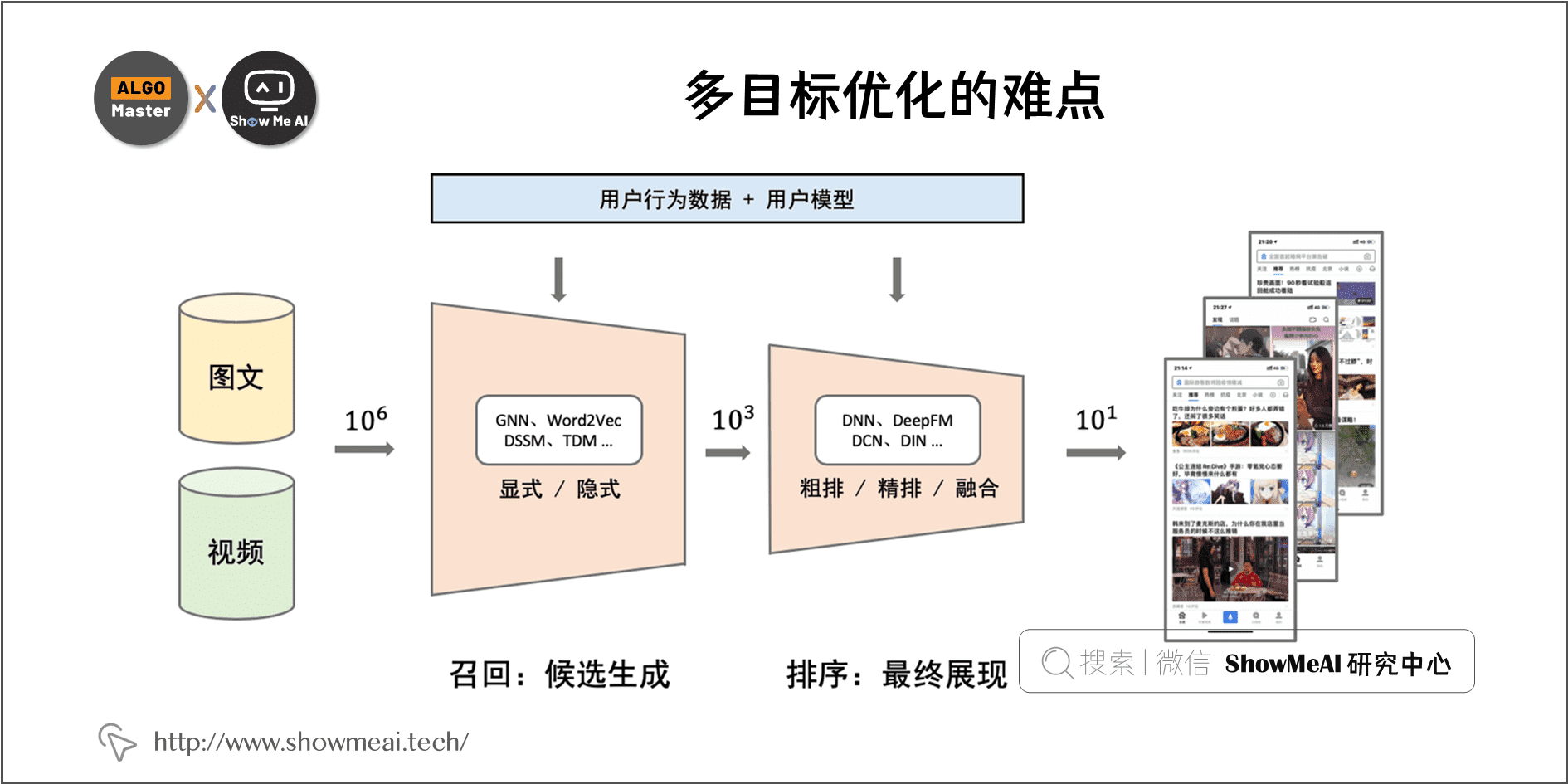
排序环节多使用CTR预估(click through rate prediction)技术来完成,业界有非常成熟的机器学习与深度学习技术方法与方案。但是,应用在多目标学习优化中,有五大难点:

① 部分目标数据稀疏,模型准确率低。 比如在电商产品中,用户下单行为显著稀疏于点击行为,下单的标签正样本数量和比例都偏小
② 在线服务计算量?。 通常多目标优化的模型有着更为复杂的模型结构,在线预估时,计算复杂度也更高;实时推荐任务需要有短响应时间和高并发支撑的稳定性,技术复杂度高一些。
③ 多个目标间重要性难以量化。 在追求点击率又追求完播率的短视频中,这两个target如何量化权衡重要度?
④ 分数融合的超参难以学习。 很多建模方案中,我们会量化得到不同的目标score,但最终融合时,涉及到的融合计算超参数不容易通过业务直接敲定,也没有合适的方法让模型学习
⑤ Label较为模糊。 很多业务中,连标签本身也是模糊的,比如资讯类产品中的阅读时长多长算长?
实际技术解决方案中,有几个非常相似的概念,分别是 多任务、多目标、多类别,他们的定义和关联如下图所示:
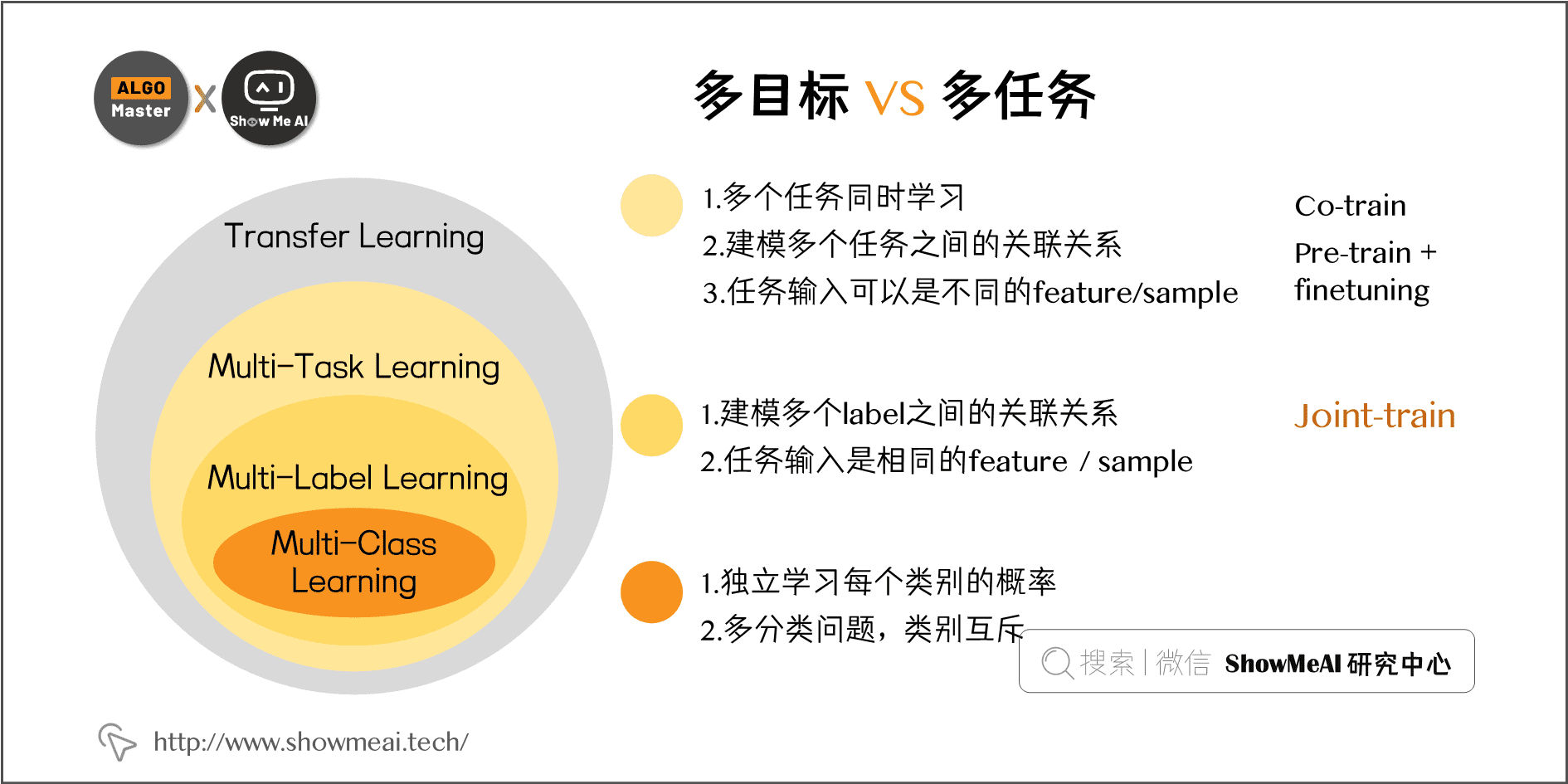
在我们这里提到的推荐多目标优化中,其实不同的目标也对应不同的 task。 比如电商场景下,在推荐的排序阶段进行CTR建模,对同一输入样本同时预估点击率、转化率多个目标,在这个场景下,我们认为多目标多任务优化可以采用同一套方法。
多任务多目标学习的实现,我们现在多采用『共享』机制完成,可以在不同任务的模型参数和特征共享两方面做设计。
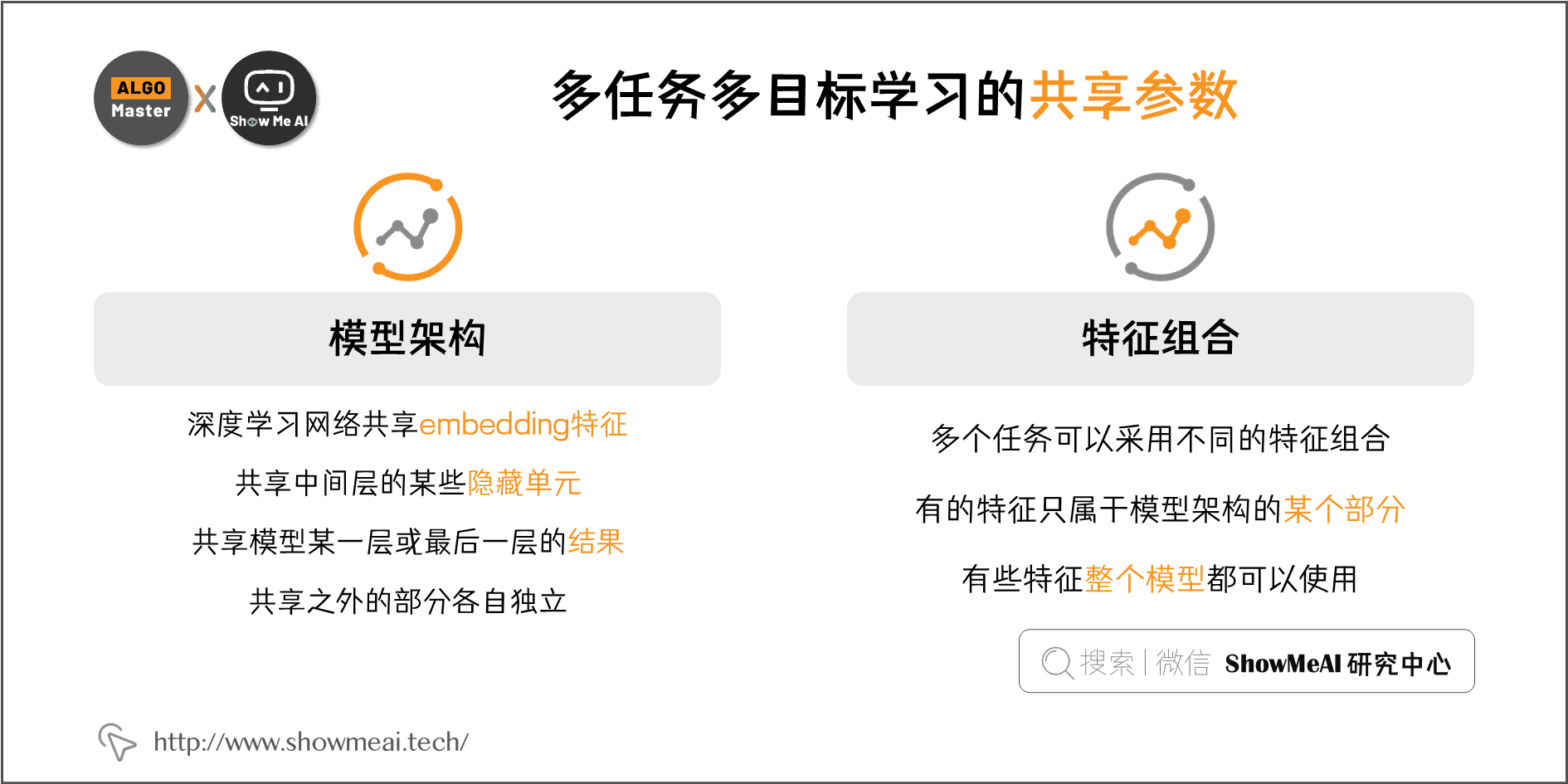
- 模型架构方面:在深度学习网络中可以共享embedding特征,或者共享中间层的某些隐藏单元,也可以是模型某一层或者最后一层的结果,并且共享之外的部分各自独立。在模型的设计中,层间关系自由组合搭配。
- 特征组合方面:多个任务可以采用不同的特征组合,有的特征只属于模型架构的某个部分,有些特征整个模型都可以使用。
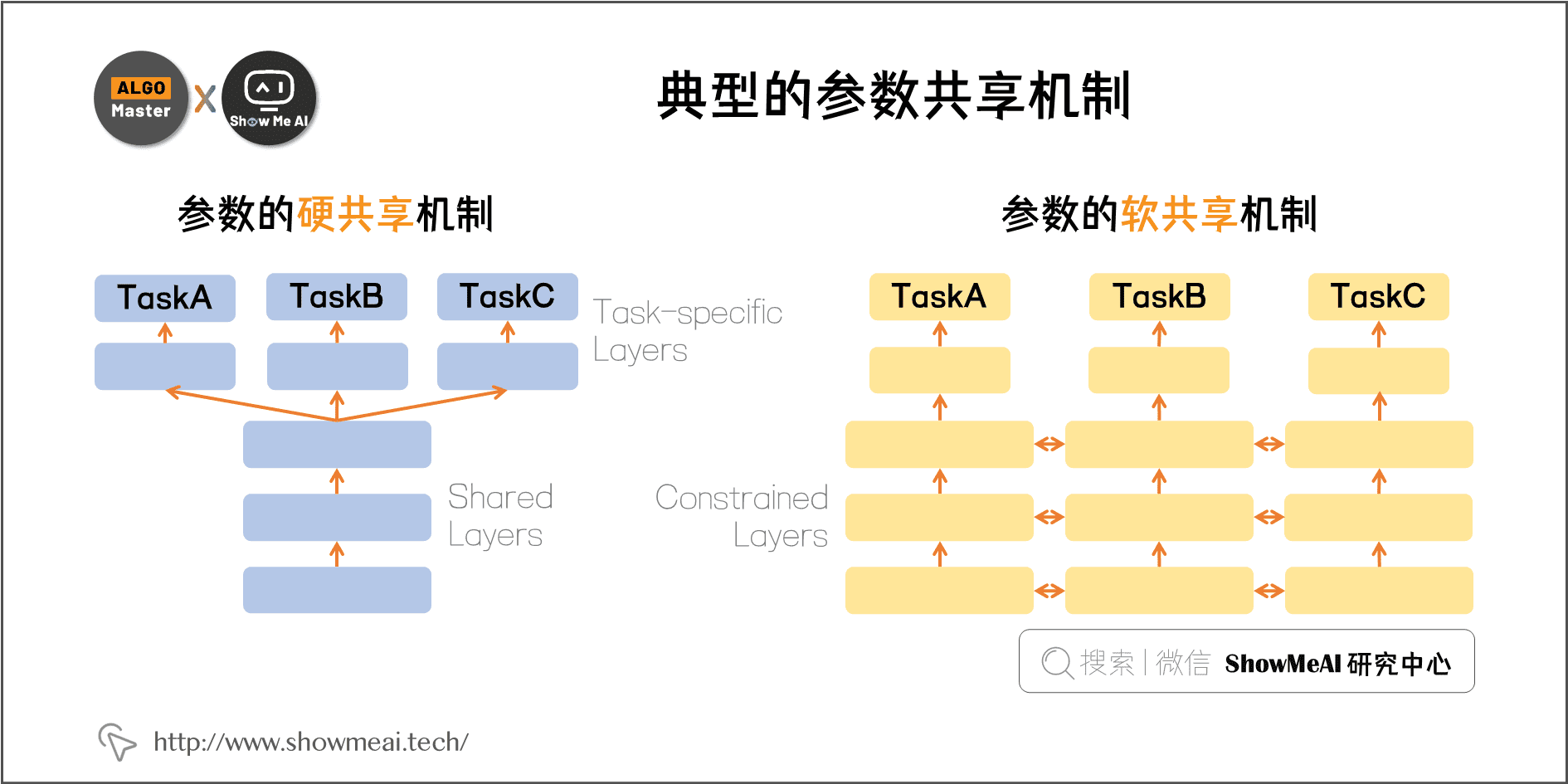
① 参数的硬共享机制?(基于参数的共享,Parameter Based)
基于参数的共享是多目标学习最常用的方法。在深度学习的网络中,通过共享特征和特征的embedding以及隐藏层的网络架构,在最后一层通过全连接+softmax的方式来区分不同任务,最后做一个线性融合来实现多目标排序。
② 参数的软共享机制?(基于约束的共享,Regularization Based)
参数的软共享机制,每个任务都有自己的参数和模型结构,可以选择哪些共享哪些不共享。最后通过正则化的方式,来拉近模型参数之间的距离,例如使用 L2 进行正则化。
实际多目标优化,在采用共享机制设计的各种模型结构后,可能有『Well Done』、『还不错』、『不理想』、『无法接受』 这 4?种不同的结果:
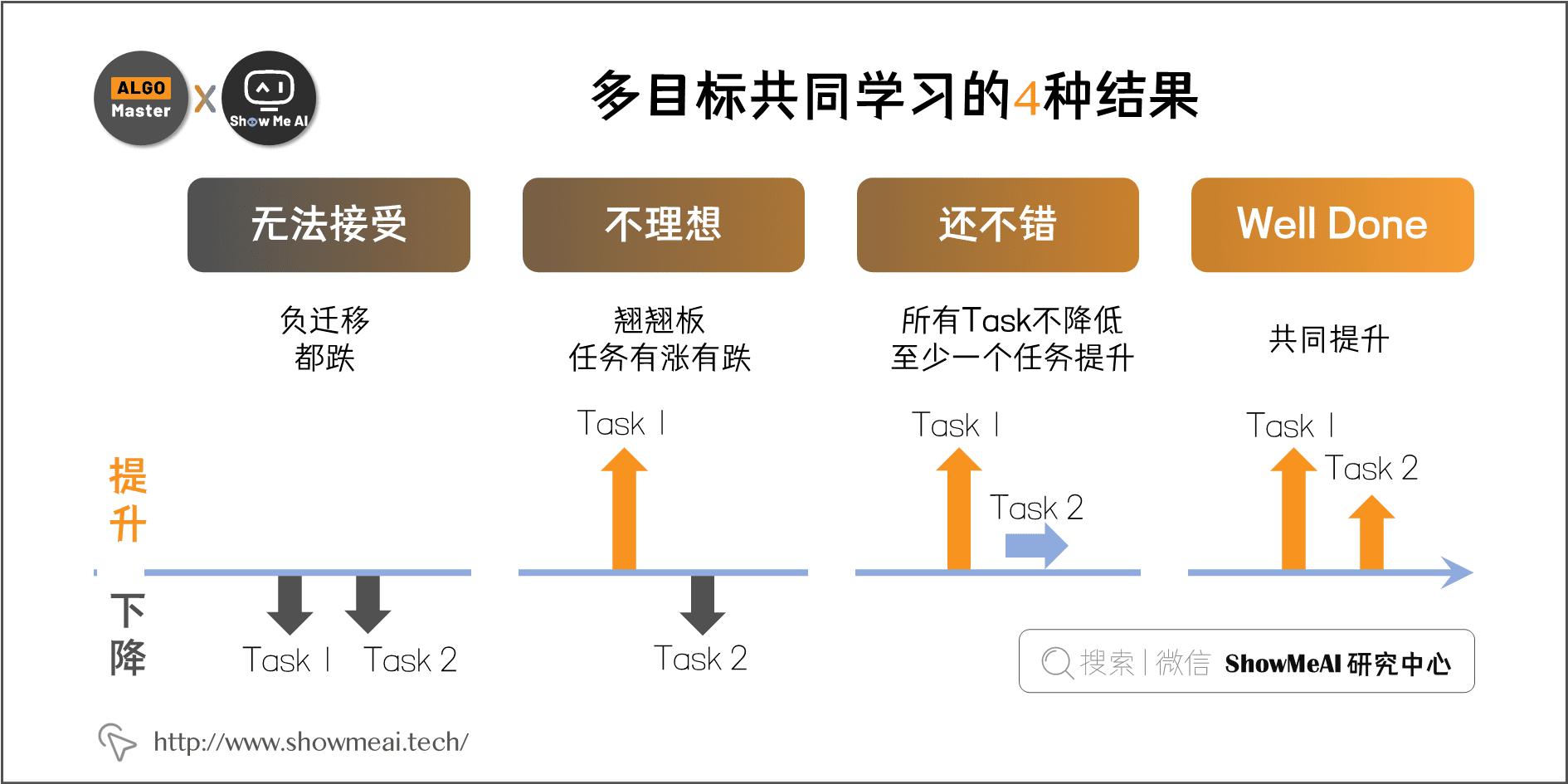
- 『Well Done』:最好的状态,所有share任务实现共同提升。
- 『还不错』:其次的状态,所有任务不降低,至少一个任务提升。如果是 主任务 + 辅助任务 的搭配,能够实现牺牲辅助任务达到主任务提升的效果,也是 well done。
- 『不理想』:跷跷板现象,任务有涨有跌。
- 『无法接受』:负迁移现象,所有任务都不如从前。
为了能够更好地『共享参数』,让同个模型中多个任务和谐共存、相辅相成、相得益彰,研究界有两大优化方向,分别是:
① 网络结构优化,设计更好的参数共享位置与方式
② 优化策略提升,设计更好的优化策略以提升优化 Loss?过程中的多任务平衡

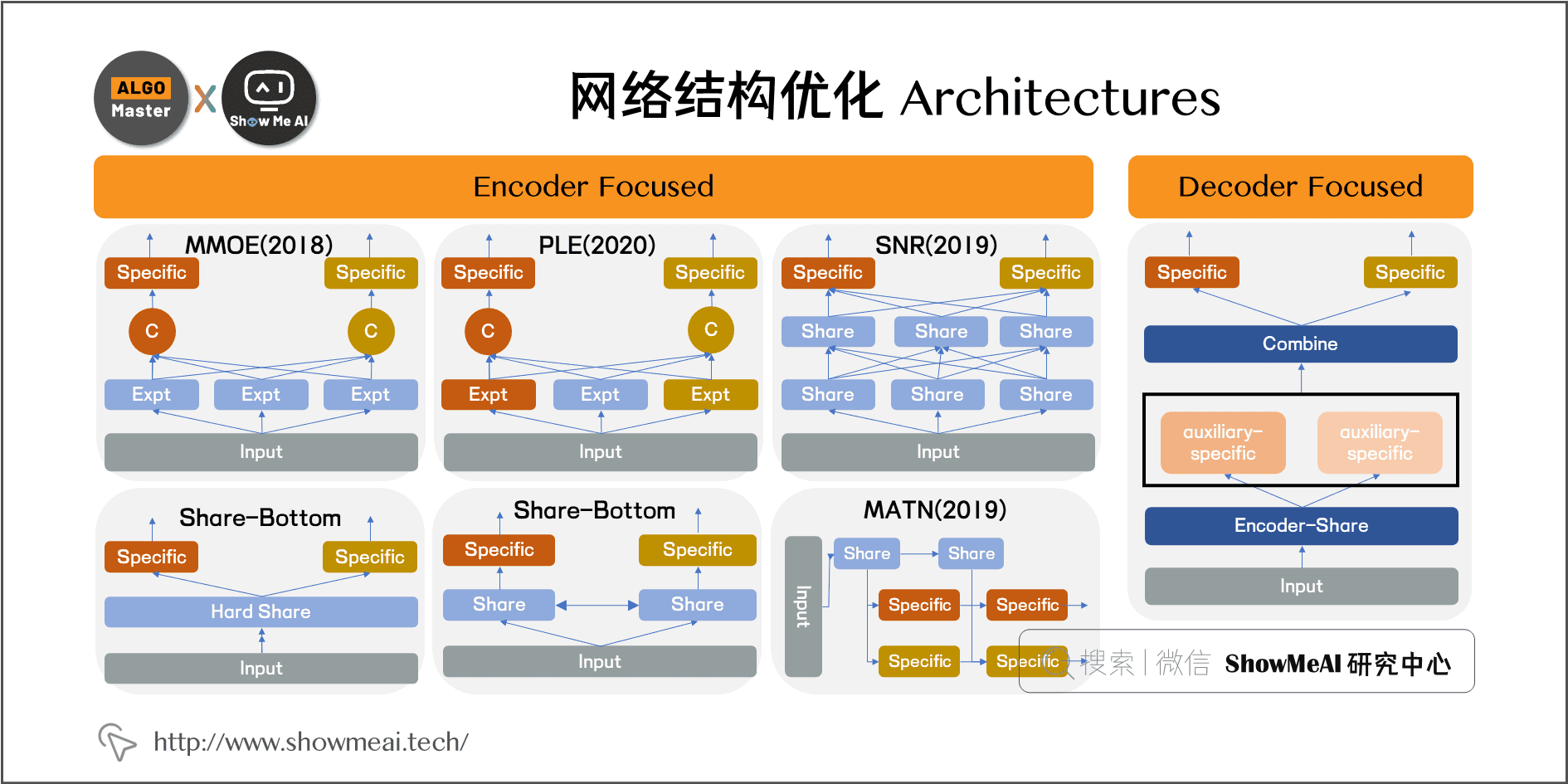
优化方向1:网络结构设计。网络结构设计方向思考哪些参数共享,在什么位置,如何共享等。
优化方向2:优化方法与策略。多目标优化策略从loss与梯度的视角去思考任务与任务之间的关系。平衡loss体量(Magnitude),调节loss更新速度(velocity),优化Gradient更新方向(direction)。在微观层面缓解梯度冲突,参数撕扯,在宏观层面达到多任务的平衡优化。
网络结构设计是目前多任务研究和应用的主要焦点,它主要思考哪些参数共享,在什么位置,如何共享。优秀合理的共享网络结构对于最终效果提升作用巨大。
近年来网络结构设计经历了?Share Bottom -->?MMoEPLE?的典型结构变迁,重要的业界顶尖企业研究人员发表的多任务网络结构设计论文包括:
- Share Bottom:早期一直在使用的方式,参数共享(hard或者soft)的方式来对多任务建模。
- 2018 Google MMOE:将hard的参数共享变成多个 expert,通过门控来控制不同loss对每个expert的影响。
- 2019 Google SNR:借助简单的 NAS(Neural Architecture Search),对 Sub-Network 进行组合,为不同目标学习各自的网络结构。
- 2020 腾讯 PLE:在 MMOE 的基础上增加了各任务独有的 Expert。
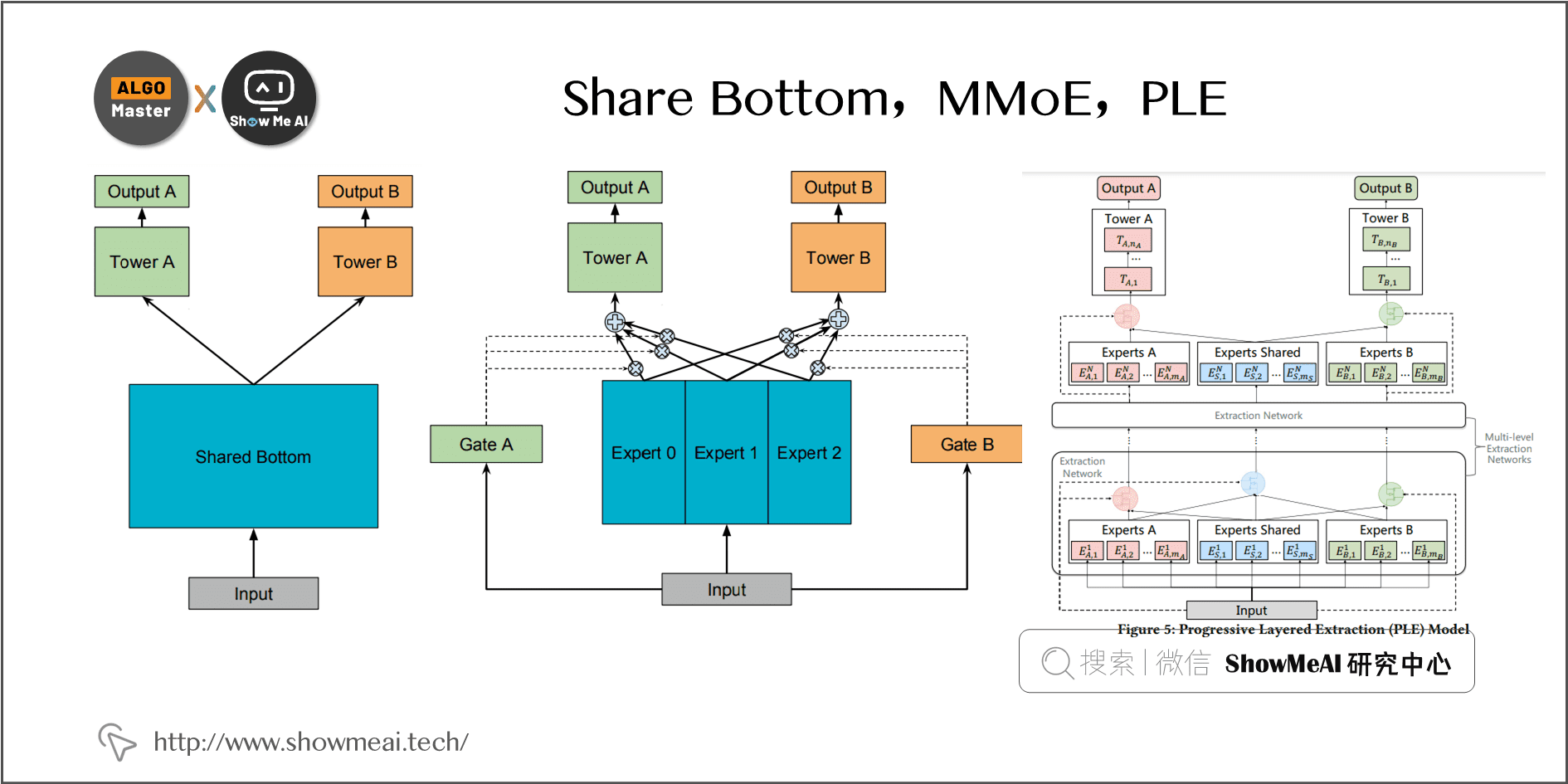
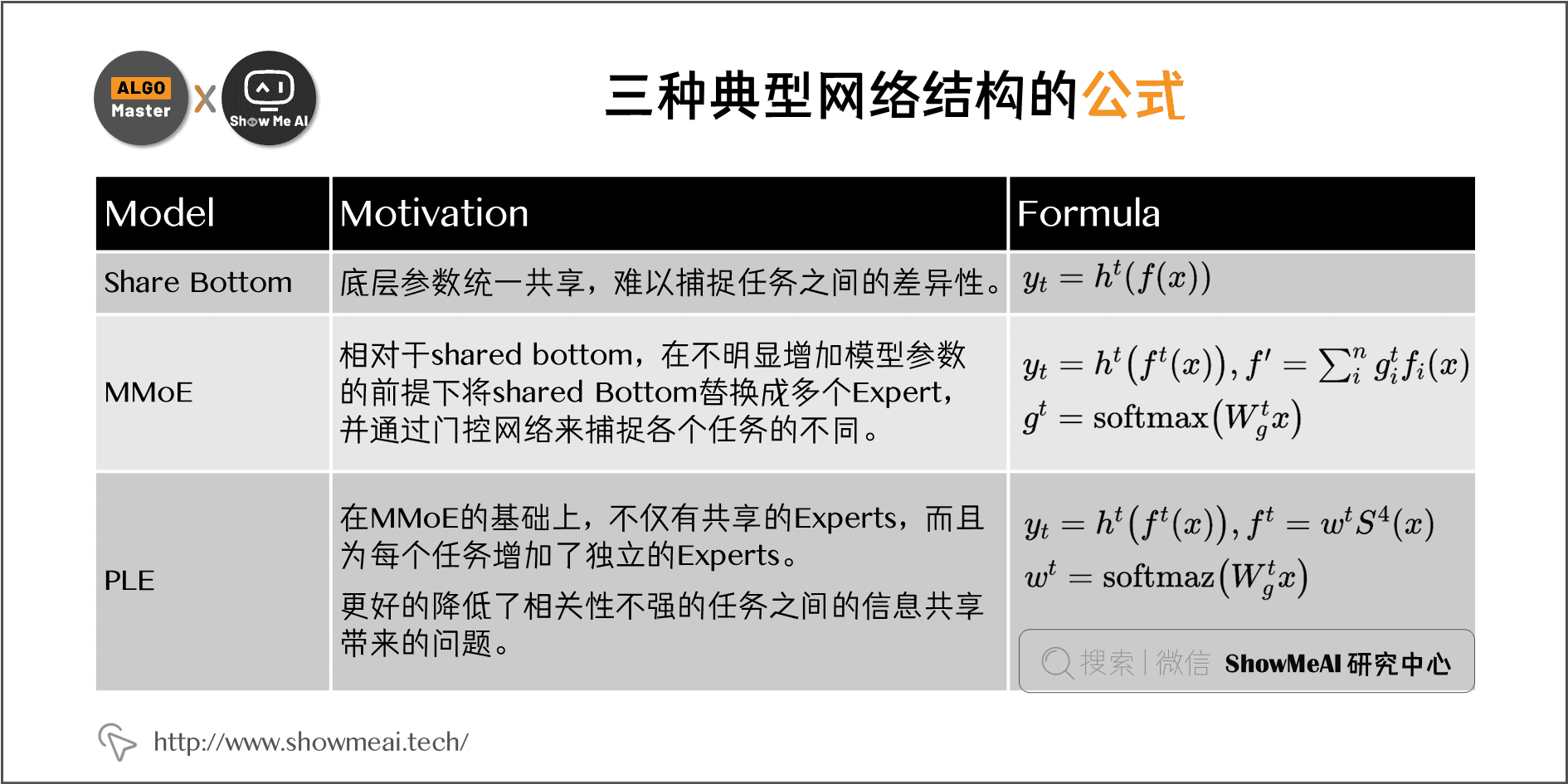
下图中对早期的Share Bottom,MMoE,PLE三种典型网络结构及对应的动机和公式做了总结。
- Shared Bottom-->MMoE:MMoE将shared bottom分解成多个Expert,然后通过门控网络自动控制不同任务对这些Expert的梯度贡献。
- MMoE -->?PLE:PLE在MMoE的基础上又为每个任务增加了自有的Expert,仅由本任务对其梯度更新。
我们来具体看一下论文中典型的网络结构:
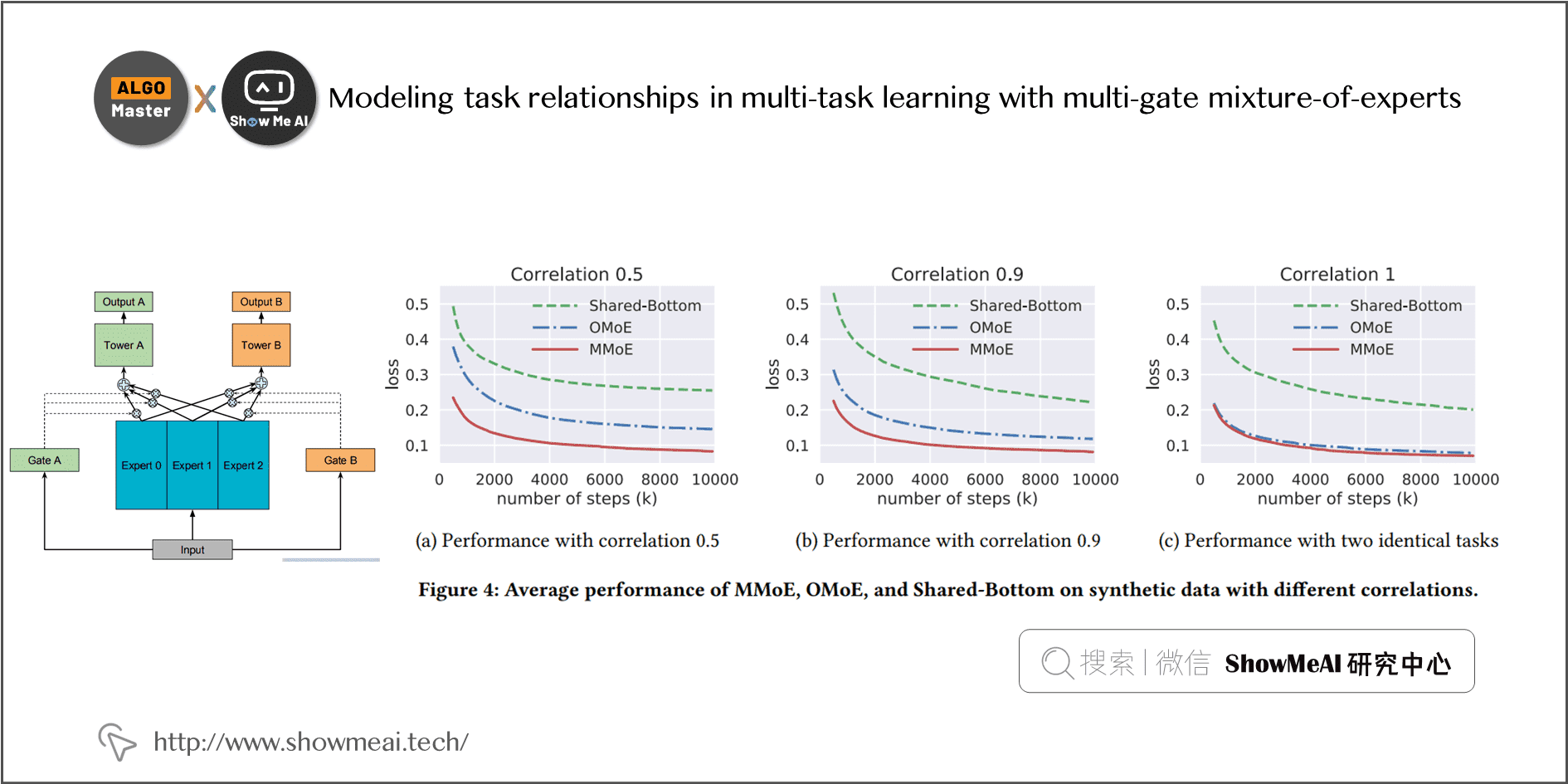
1)MMoE:Google KDD 2018,现CTR建模多任务学习标配 [1]
Google《Modeling task relationships in multi-task learning with multi-gate mixture-of-experts》提出的 MMoE 几乎成为各家互联网公司做多任务多目标学习排序的标配结构。 在 Google 这篇 paper 中,研究人员通过人工控制两个任务的相似度,测试和研究不同网络结构的表现效果。
MMoE 结构设计中的 Multi-gate 对于任务差异带来的冲突有一定的缓解作用,即使在多任务之间的的相关性不高的情况下,也有不错的效果。 MMoE 中不同的 expert 负责学习不同的信息内容,然后通过 gate 来组合这些信息,通过不同任务 gate 的 softmax 的热力分布差异,来表明expert对不同的目标各司其责,从而提升了效果。
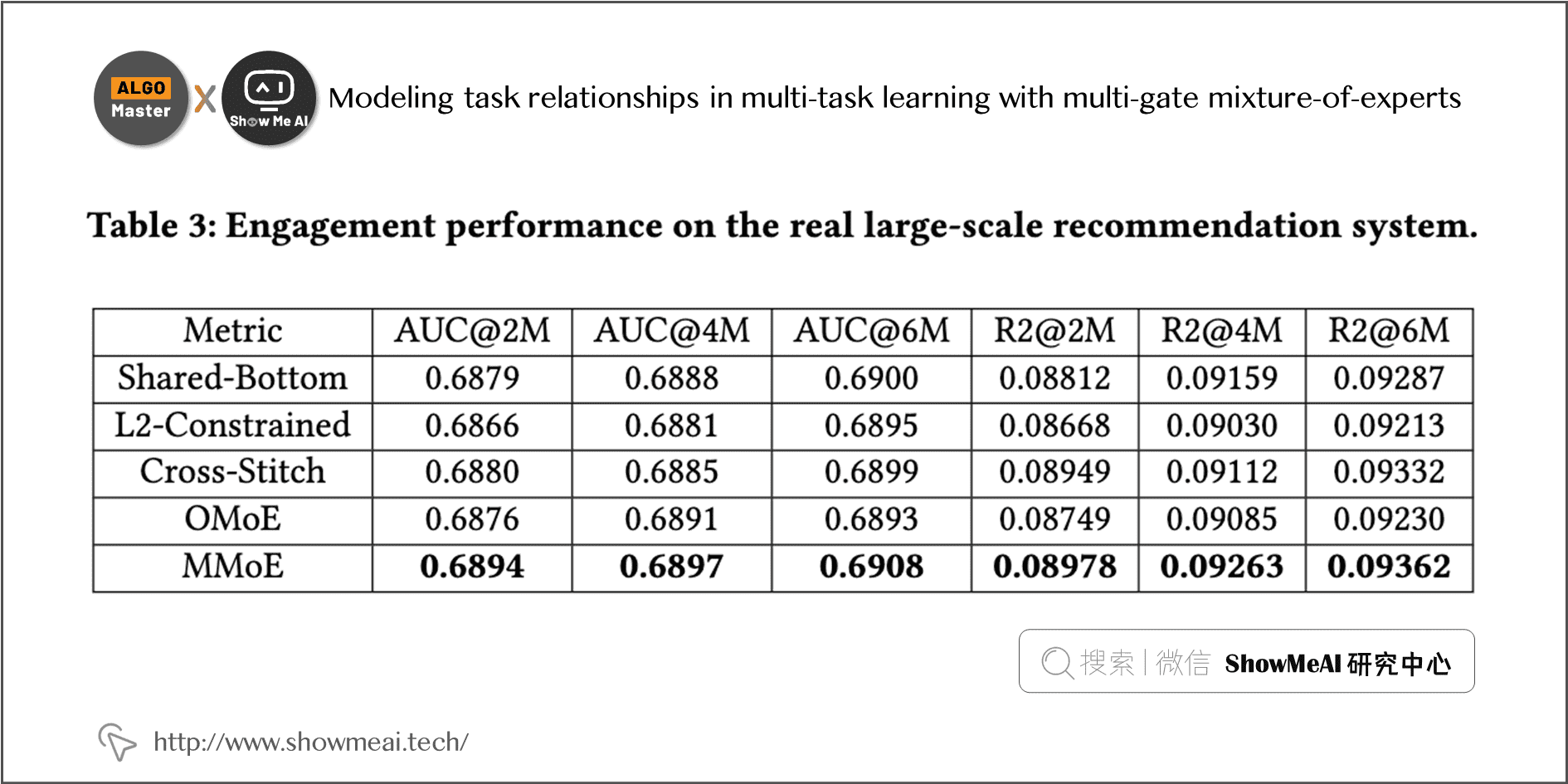
论文中大规模推荐系统数据集实验结果如下,MMoE 相对于 share bottom 的方式,各指标都有明显的提升:
MMoE核心代码参考:
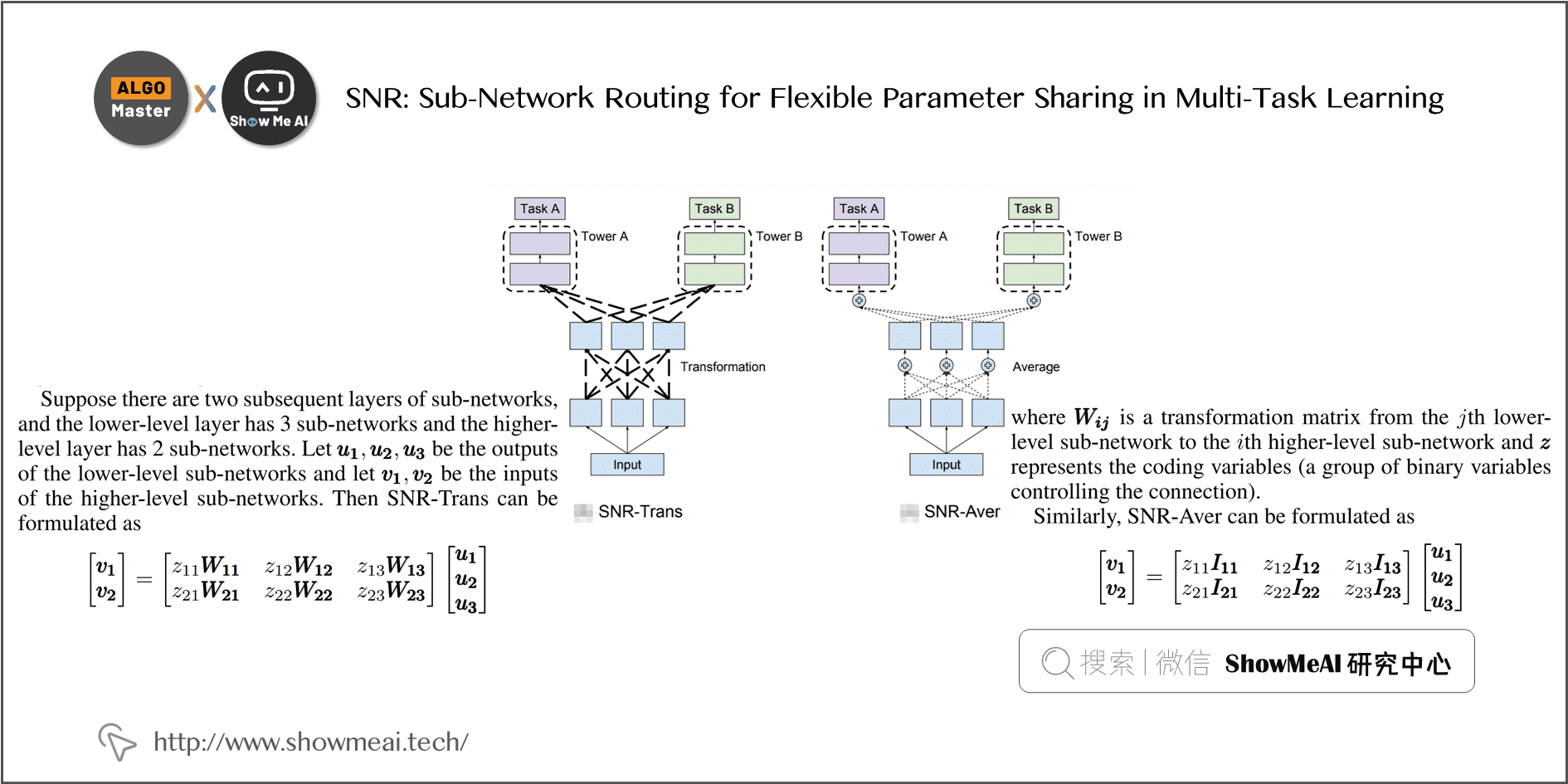
2)SNR:Google AAAI 2019,对MMoE的改进工作 [2]
Google这篇《SNR: Sub-Network Routing forFlexible Parameter Sharing in Multi-Task Learning》paper 的思路与网络自动搜索(NAS)接近,通过动态学习产出多任务各自采用的 sub-network。研究思路是希望在更相似的任务下能学习到共享多一些的结构。
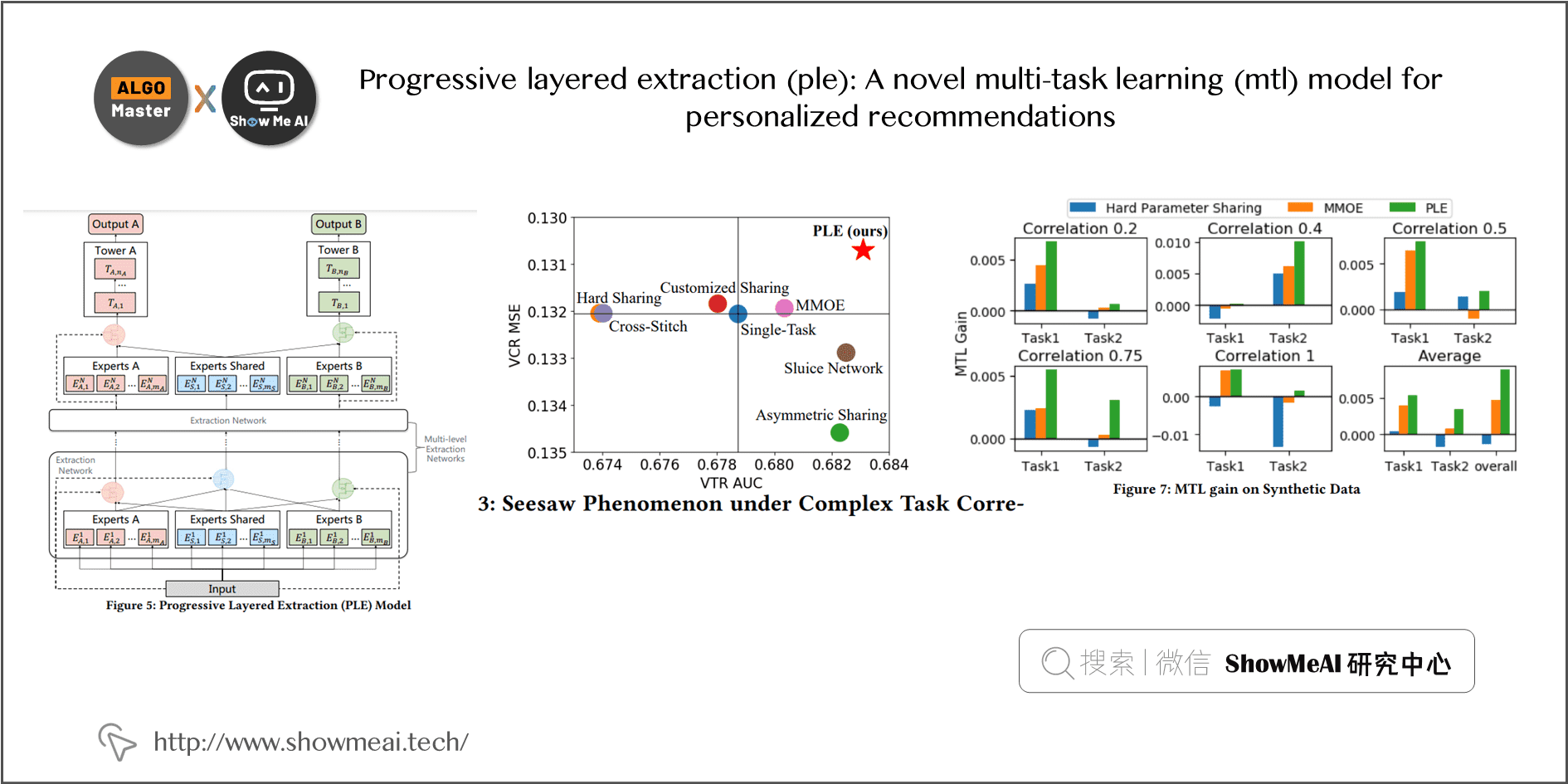
3)PLE :腾讯 RecSys 2020, 改进MMoE,结构简单效果好 [3]
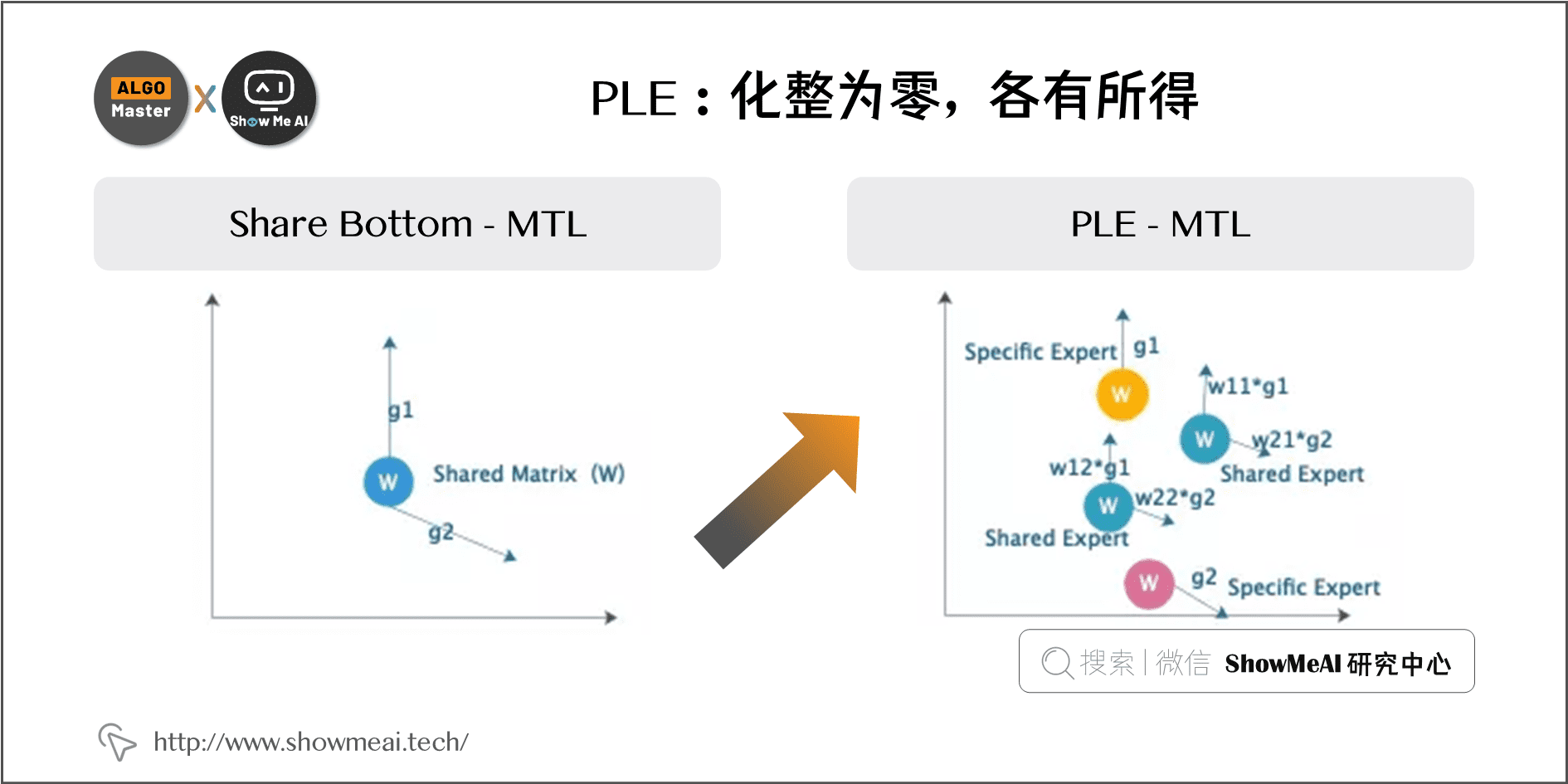
腾讯这篇《Progressive layered extraction (ple): A novel multi-task learning (mtl) model for personalized recommendations》paper 提出 PLE,主要是在 MMoE 的基础上,为每个任务增加了自己的 specific expert,仅由本任务对其梯度更新。
如下图所示,在 Share Bottom 的结构上,整个共享参数矩阵如同质量较大的物体,在梯度更新的环节,两个 Loss?反向计算的梯度向量分别是和?,是这个物体受到的两个不同方向不同大小的力,这两个力同时来挪动这个物体的位置,如果在多次更新中两个力大概率方向一致,那么就能轻松达到和谐共存、相辅相成。反之,多个力可能出现彼此消耗、相互抵消,那么任务效果就会大打折扣。
MMoE 通过『化整为零』,把一个共享参数矩阵化成多个结合 gate 的共享 Expert,这样不同的loss在存在相互冲突的时候,在不同的 expert 上,不同 Loss?可以有相对强弱的表达,那么出现相互抵消的情况就可能减少,呈现出部分 experts 受某 task 影响较大,部分 experts 受其他task主导,形成『各有所得』的状态。而PLE增加了spcific experts,能进一步保障『各有所得』,保证稳定优化。
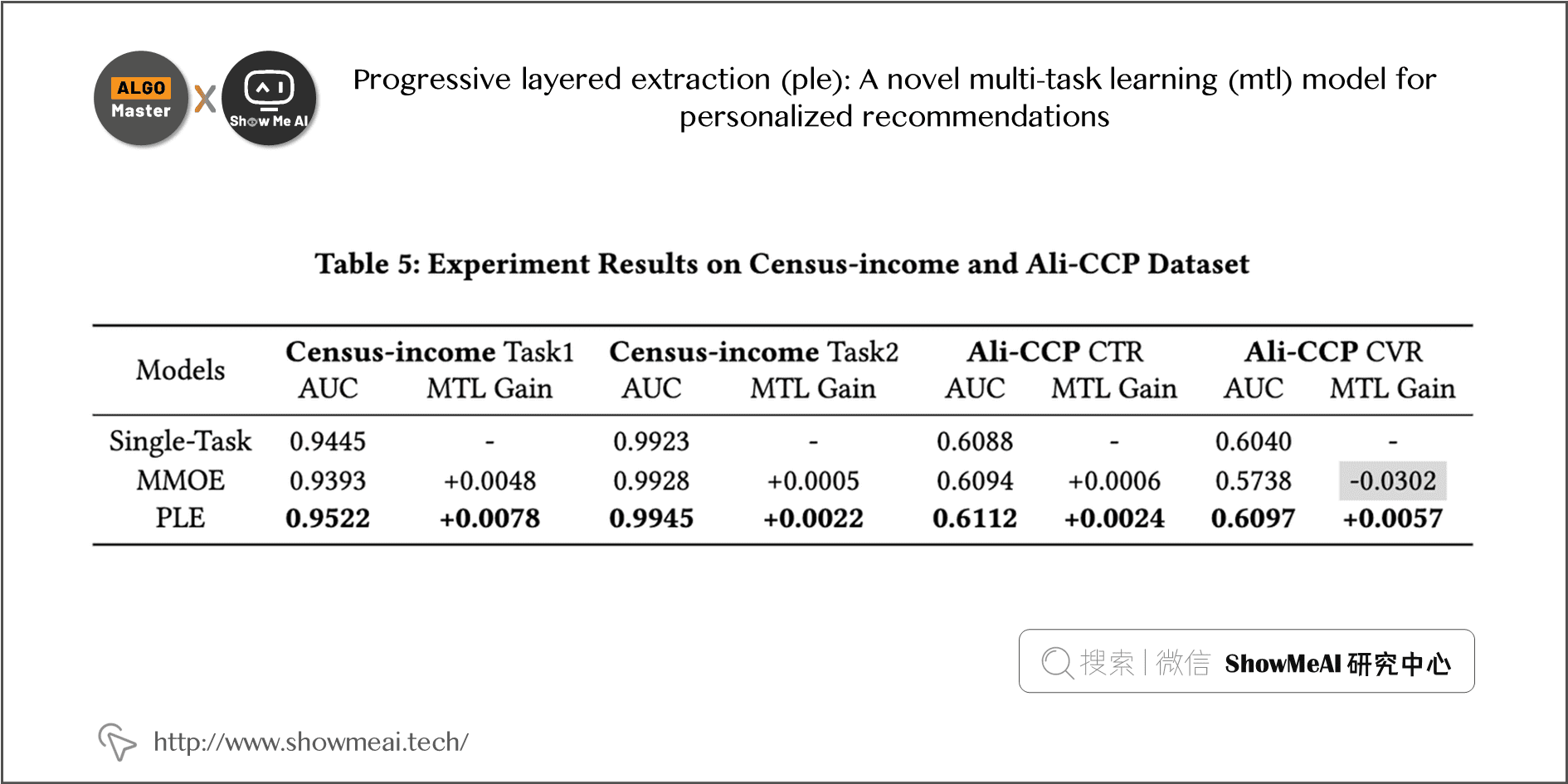
最终的paper实验结果如下:
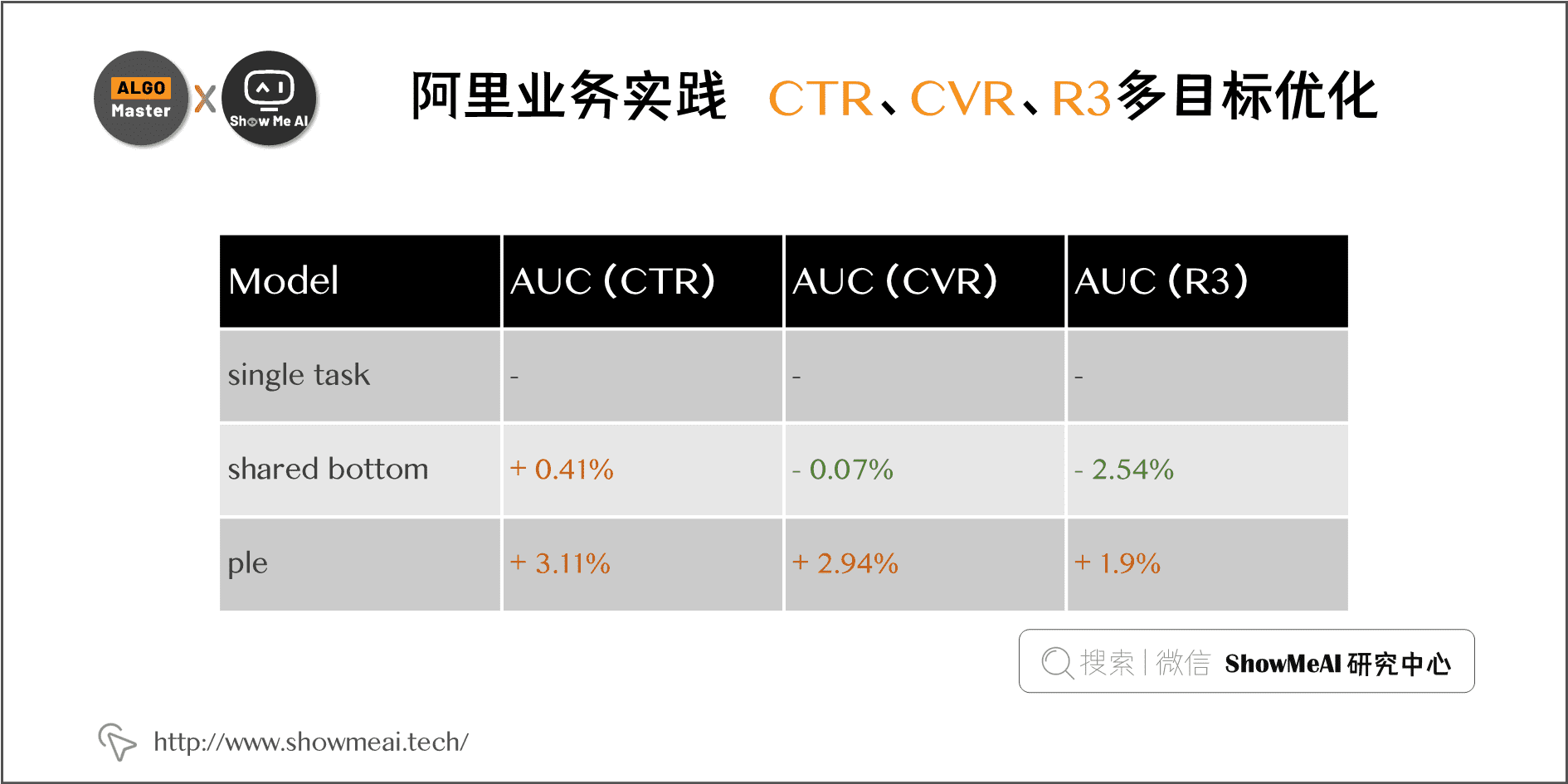
阿里的业务下,对 CTR、CVR、R3 这3个指标进行多目标优化,对于 single task 的相对提升结果如下表。其中 Share-Bottom 出现了翘翘板现象,而 PLE 实现了多目标共赢的结果。
PLE核心代码参考:
优化方法更多的考虑的是在已有结构下,更好地结合任务进行训练和参数优化,它从 Loss?与梯度的维度去思考不同任务之间的关系。在优化过程中缓解梯度冲突,参数撕扯,尽量达到多任务的平衡优化。
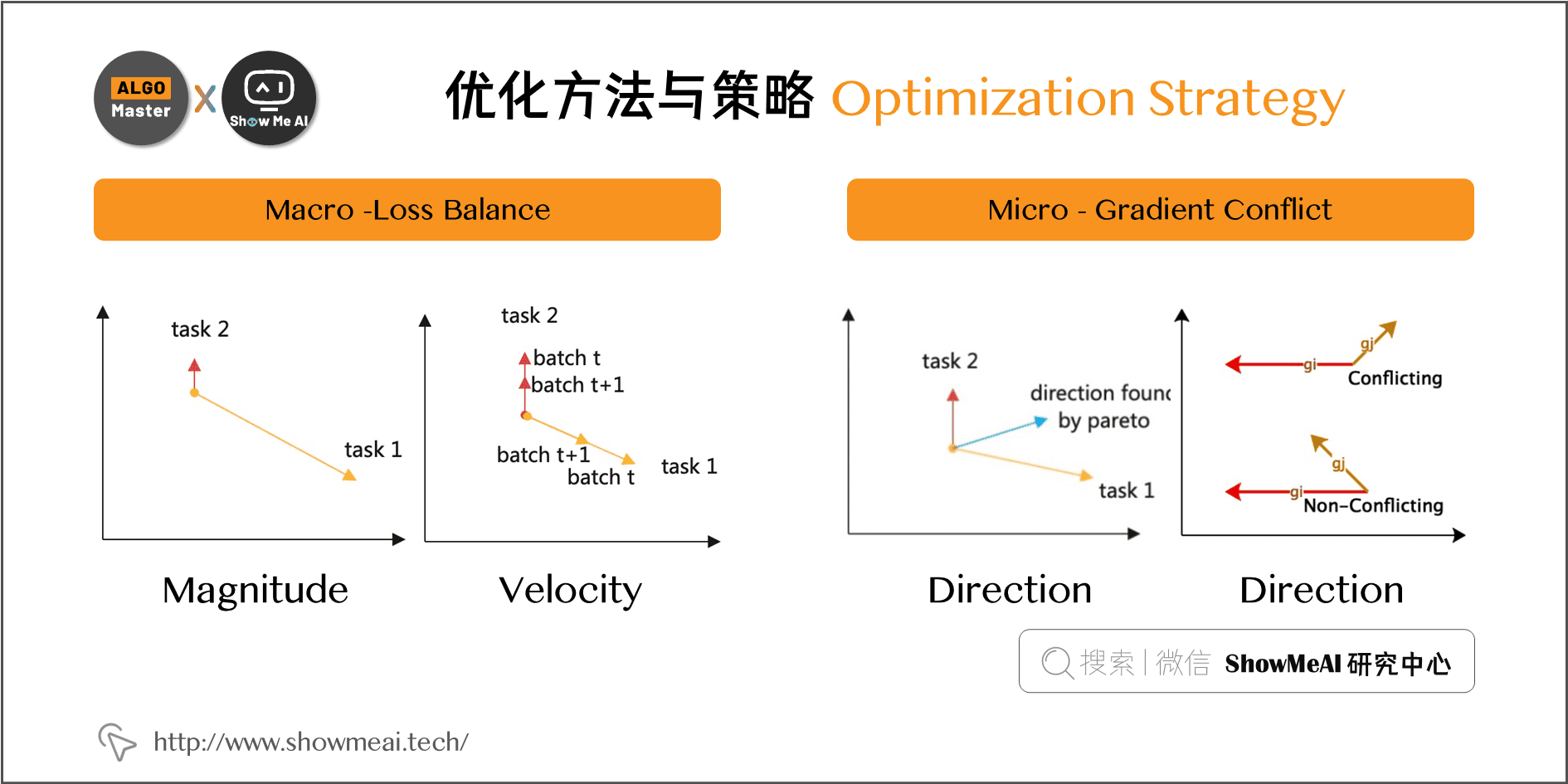
目前各式各样的多任务多目标优化方法策略,主要集中在3个问题:
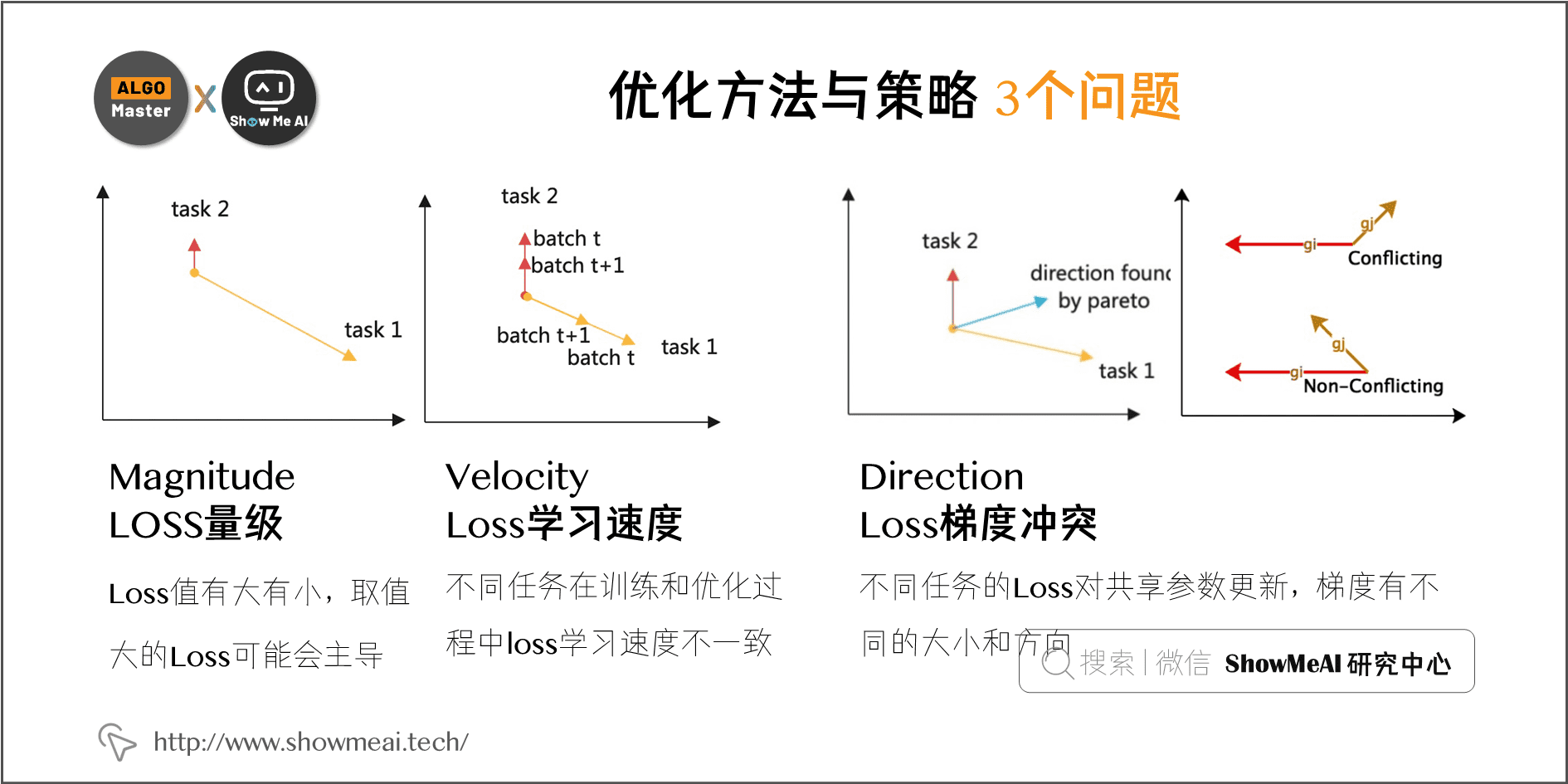
Loss 值有大有小,取值大的 Loss 可能会主导,如图所示,需要处理这个问题。典型的例子是二分类任务 + 回归任务的多目标优化,L2 Loss 和交叉熵损失的 Loss 大小与梯度大小的量级和幅度可能差异很大,如果不处理会对优化造成很大干扰。
2)Velocity (Loss学习速度)
不同任务因为样本的稀疏性、学习的难度不一致,在训练和优化过程中,存在 Loss 学习速度不一致的情况。如果不加以调整,可能会出现某个任务接近收敛甚至过拟合的时候,其他任务还是欠拟合的状态。
不同任务的 Loss 对共享参数进行更新,梯度存在不同的大小和方向,相同参数被多个梯度同时更新的时候,可能会出现冲突,导致相互消耗抵消,进而出现跷跷板、甚至负迁移现象。 这也是核心需要处理的问题。
针对上述3大核心问题,近年来典型的研究子方向和优秀的产出方法如下图表:
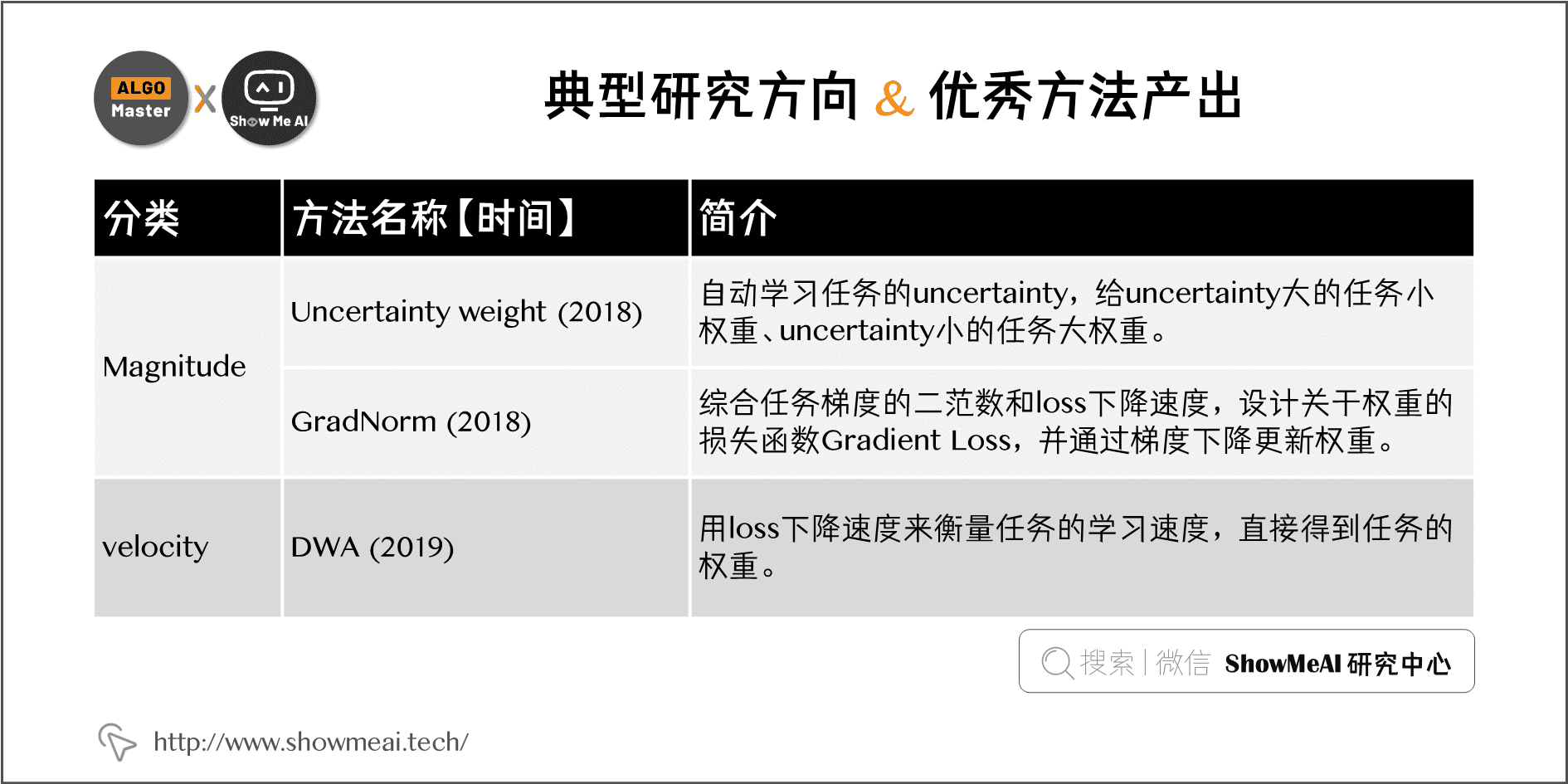
1)Uncertainty Weight [4]
简单的多任务学习往往是把所有 Loss?进行联合优化,通常需要需要手动调节他们的 weights。典型的Function 如下:
然而这种方式通常存在如下问题:
模型最后学习效果对于 weights 非常敏感,否则很难同时收获对于多个任务都比较优的模型。同时手工调节这些 weights 也是非常费时费力的工作。 这篇paper提出直接建模单个任务中的uncertainty,然后通过uncertainty来指导权重的调节。
![]()
?为直接建模的uncertainty,是一个可学习的参数。 总 Loss 设计成这样的形式,模型优化过程中会倾向于惩罚高 Loss 而低?的情况(如果一个任务的 Loss 高,同时?
?又小的话,这一项就会很大,优化算法就会倾向于优化它)。
?背后的含义是: Loss 大的任务,包含的uncertainty也应该多,而它的权重就应该小一点。 这样优化的结果就是往往 Loss 小(『相对简单』)的任务会有一个更大的权重。例如在分类 + 回归的多目标优化任务中,回归任务 Loss 大,Uncertainty Weight给予小权重,整体效果可能是有帮助的。
Uncertainty Weight核心代码参考:
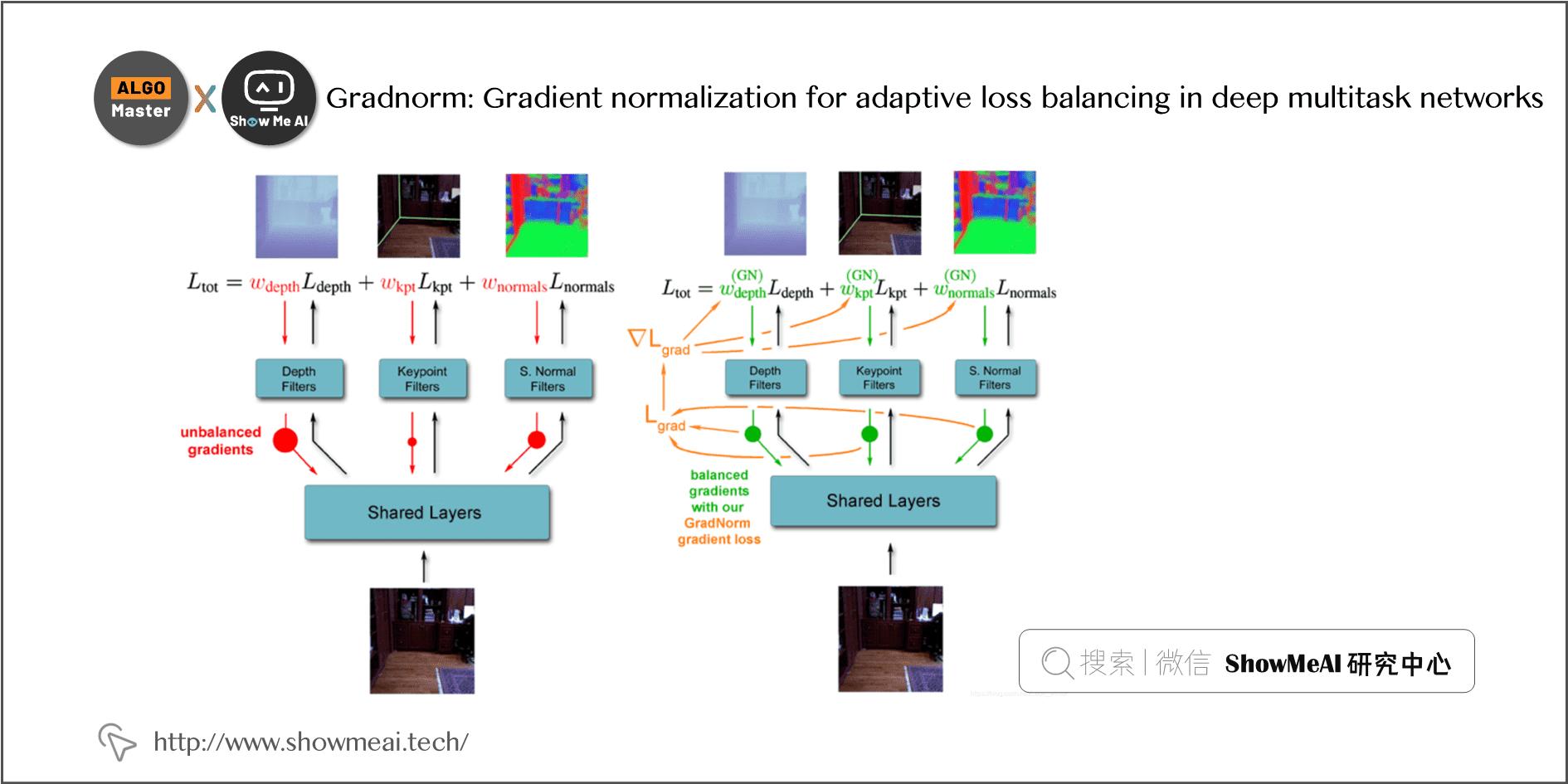
2)GradNorm [5]
Gradient normalization方法的主要思想是:
- 希望不同的任务的 Loss 量级是接近的
- 希望不同的任务以相似的速度学习
《Gradnorm: Gradient normalization for adaptive loss balancing in deep multitask networks》这篇paper尝试将不同任务的梯度调节到相似的量级来控制多任务网络的训练,以鼓励网络以尽可能相同的速度学习所有任务。
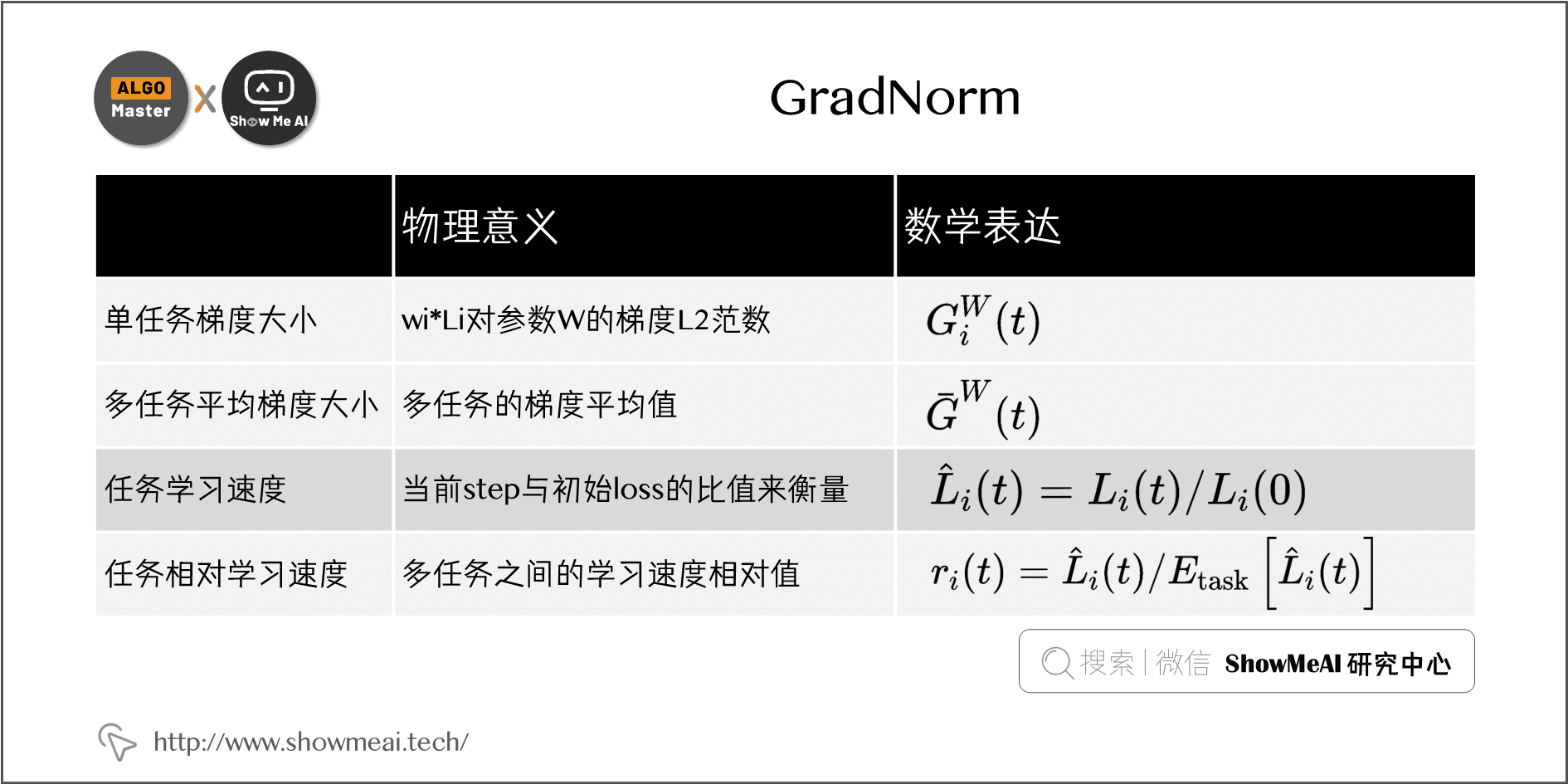
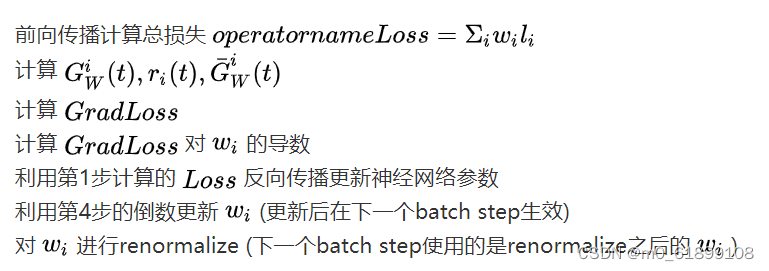
Gradient normalization具体实现方式如下:

gradnorm在单个batch step的流程总结如下:
GradNorm核心代码参考:
3)DWA [6]
《End-to-End Multi-Task Learning with Attention》这篇paper中直接定义了一个指标来衡量任务学习的快慢,然后来指导调节任务的权重。
用这一轮loss除以上一轮loss,这样可以得到这个任务loss的下降情况用来衡量任务的学习速度,然后直接进行归一化得到任务的权重。当一个任务loss比其他任务下降的慢时,这个任务的权重就会增加,下降的快时权重就会减小。是只考虑了任务下降速度的简化版的Gradient normalization,简单直接。
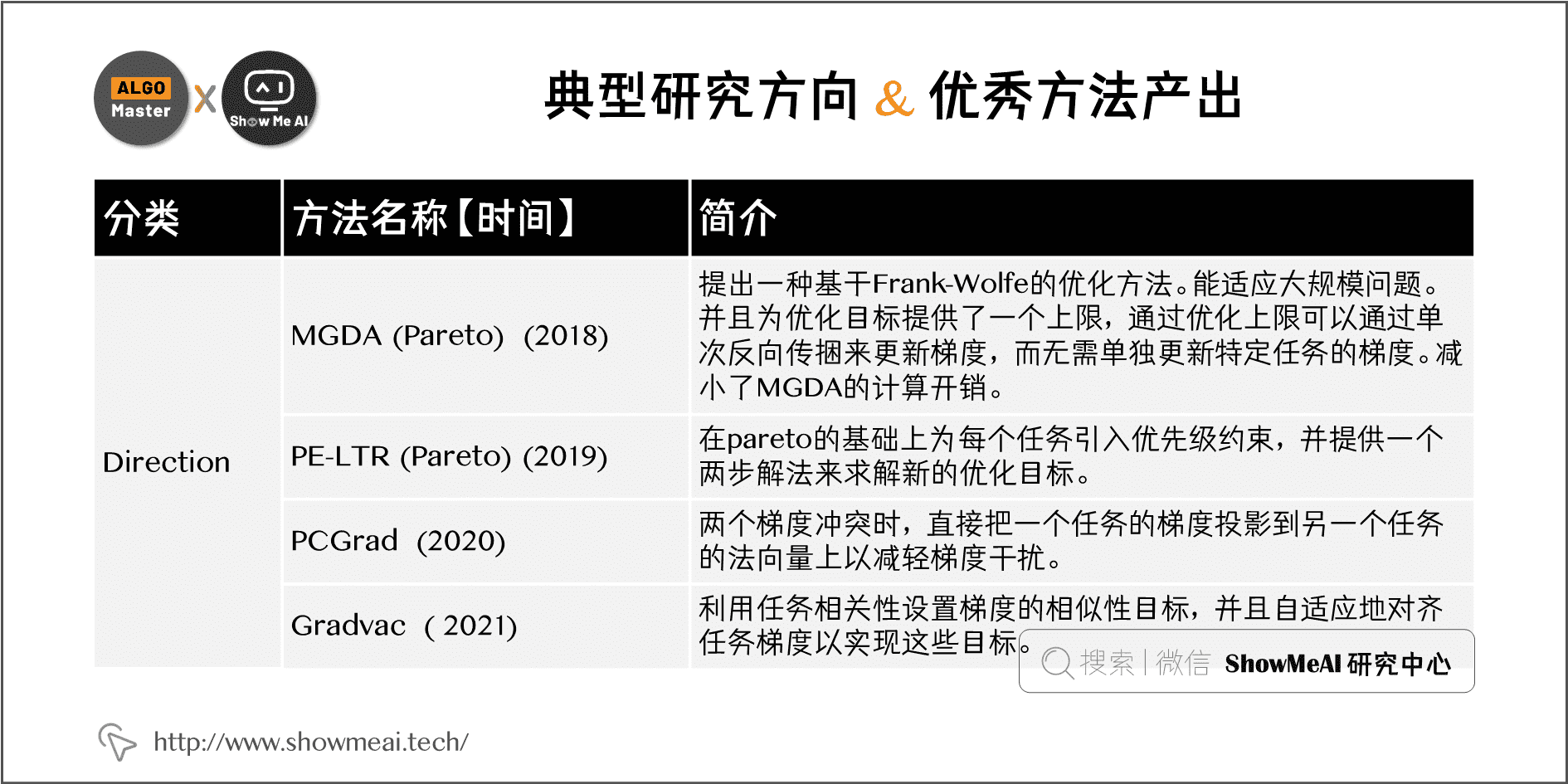
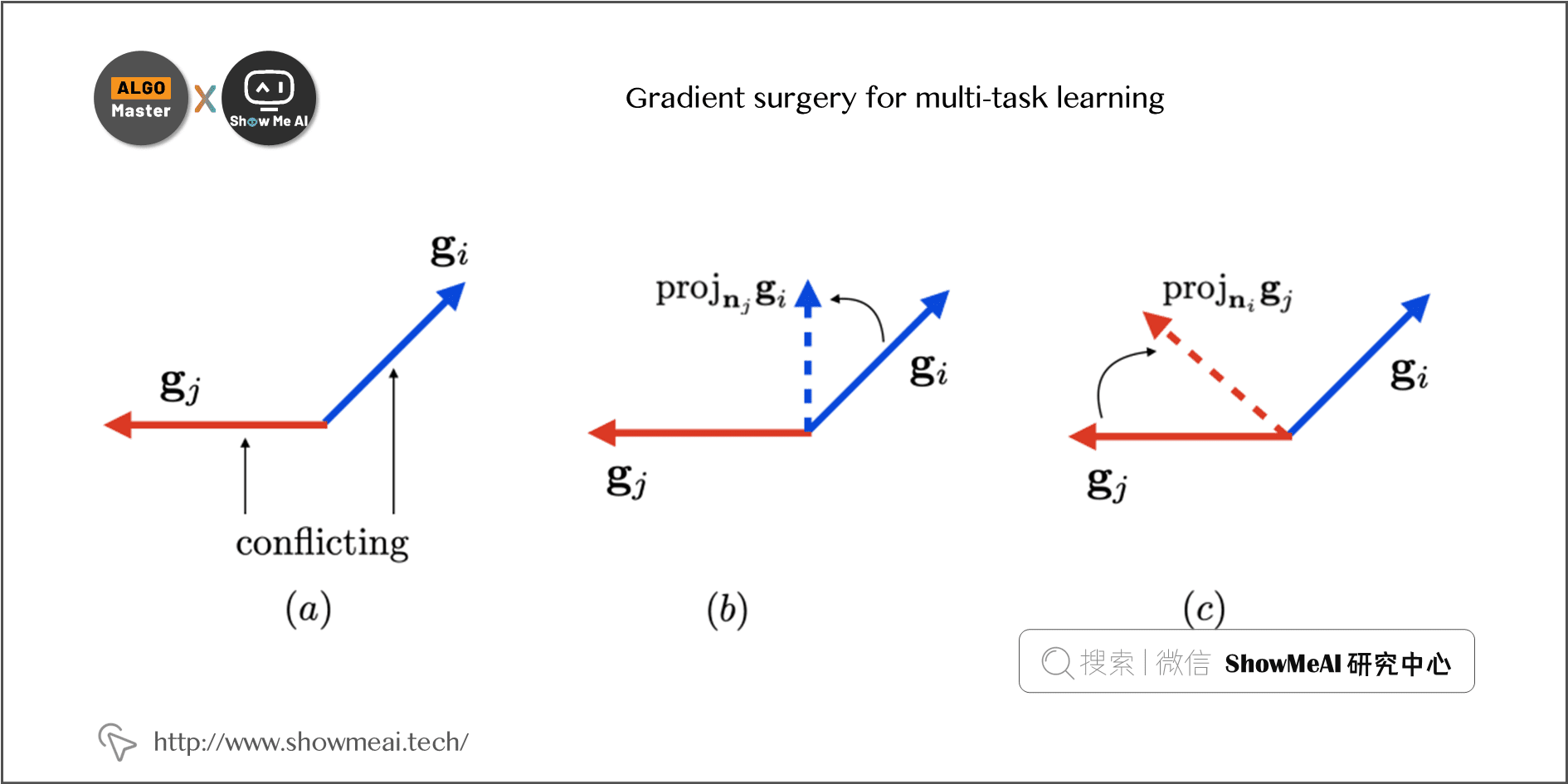
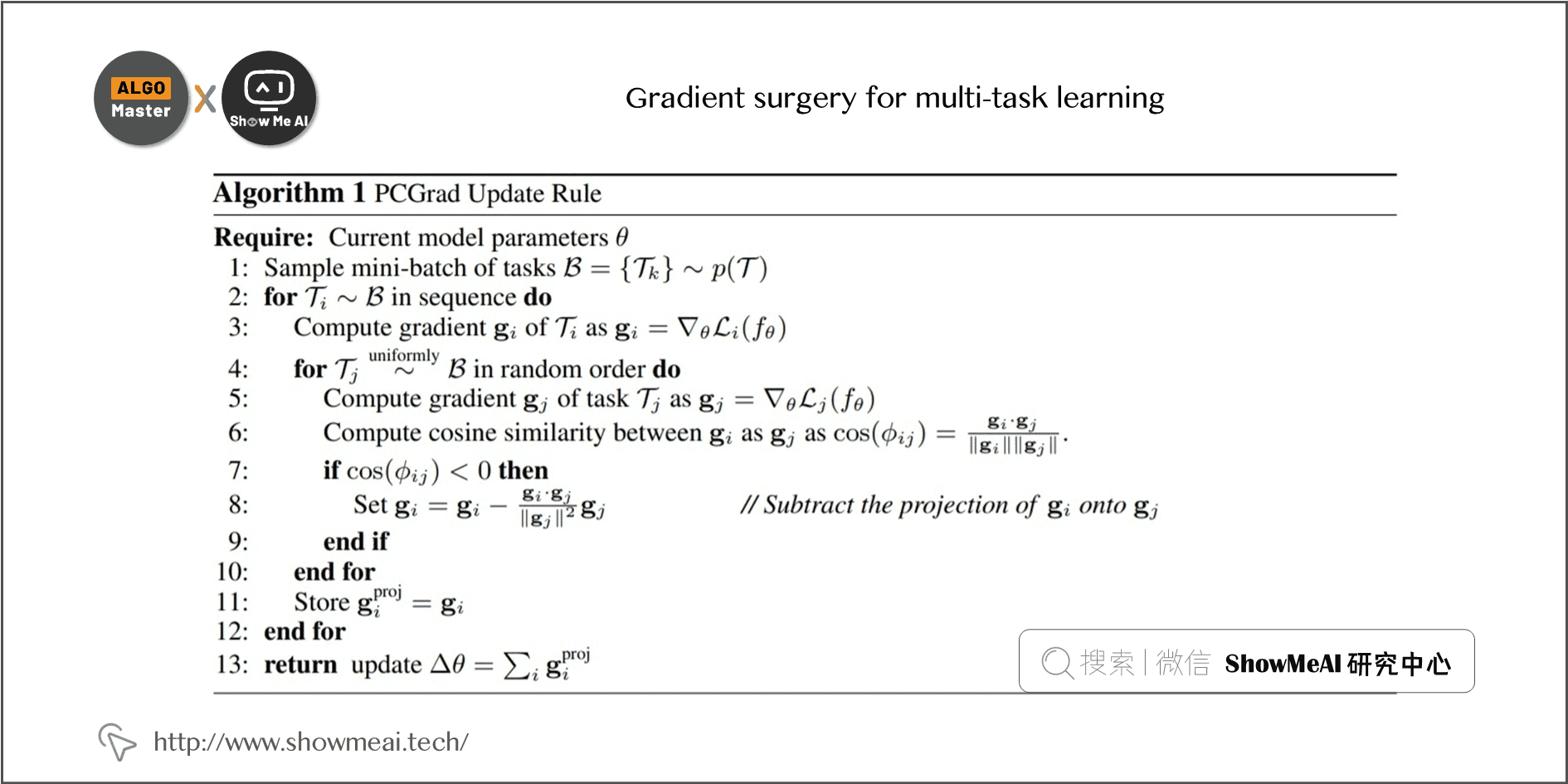
4)PCGrad [7]
PCGrad是Google在NIPS 2020《Gradient surgery for multi-task learning》这篇paper里提出的方法,PCGrad指出MTL多目标优化存在3个问题:
① 方向不一致,导致撕扯,需要解决
② 量级不一致,导致大gradients主导,需要解决
③ 大曲率,导致容易过拟合,需要解决
解决办法如下:
- 先检测不同任务的梯度是否冲突,冲突的标准就是是否有 negative similarity;
- 如果有冲突,就把冲突的分量 clip 掉(即,把其中一个任务的梯度投影到另一个任务梯度的正交方向上)。
论文中的算法步骤如下:
PCGrad核心代码参考:
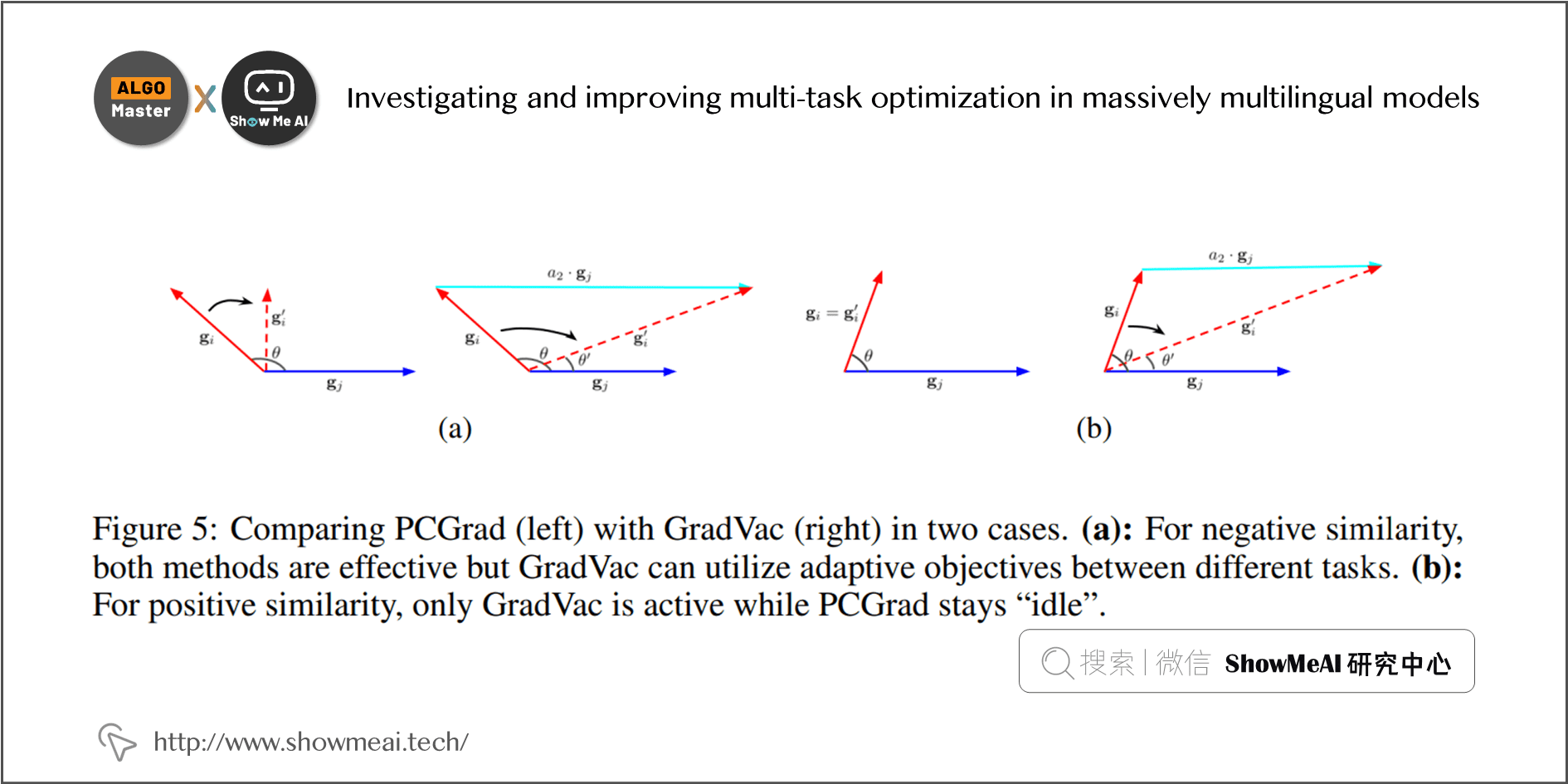
5)GradVac [8]
GradVac是Google在ICLR 2021《Investigating and improving multi-task optimization in massively multilingual models》这篇paper里提出的方法,作为PCGrad的改进应用在多语种机器翻译任务上。
对比PCGrad,我们看看GradVac的做法:
- PCGrad只是设置了一个下界。让两个任务的cosine相似度至少是大于等于0的,不能出现负数。这个下界非常容易达到。
- 两个任务的真实相似度,其实是会逐渐收敛到一个水位。这个值可以认为是两个任务的真实相似度。
- 两个任务的Gradinet相似度,应当去靠近这个相似度,而不是只满足PCGrad设置的下界。
总结一下,本文提到了多目标多任务场景下的优化方法,主要包含 网络结构优化 和 优化方法和策略提升两方面,最终目标都是希望缓解任务间的冲突和内耗,尽量优化提升所有业务目标。要构建一个promising的共赢多任务多目标解决方案,一些经验tips如下:

- 1)首先关注业务场景,思考业务目标优化重点,进而确定多任务的组合形式:
- 主任务 + 主任务:解决业务场景既要又要的诉求,多个任务都希望提升
- 主任务 + 辅任务:辅助任务为主任务提供一些知识信息的增强,帮助主任务提升 2.考虑不同任务间的重要度和相似性,考虑清楚辅助任务和主任务的关系;
- 2)实际训练过程中,可以训练优化其中1个任务,观察其他任务的loss变化
- 其他任务loss同步下降,则关联性较强
- 其他任务loss抖动或有上升趋势,要回到业务本身思考是否要联合多任务训练
- 3)网络结构选择MMoE或者PLE
- 4)训练过程中关注Loss的量级,如果不同任务之间差异很大,注意约束和控制
- 5)训练过程的优化策略,可以尝试PCGrad等方法对梯度进行调整,并观察效果
- [1]?Ma J, Zhao Z, Yi X, et al. Modeling task relationships in multi-task learning with multi-gate mixture-of-experts[C]//Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining. 2018: 1930-1939.
- [2]?Jiaqi Ma, Zhe Zhao, Jilin Chen,et al. SNR: Sub-Network Routing forFlexible Parameter Sharing in Multi-Task Learning[C]//The Thirty-Third AAAI Conference on Artificial Intelligence (AAAI-19).2019: 216-223
- [3]?Tang H, Liu J, Zhao M, et al. Progressive layered extraction (ple): A novel multi-task learning (mtl) model for personalized recommendations[C]//Fourteenth ACM Conference on Recommender Systems. 2020: 269-278.
- [4]?Kendall A, Gal Y, Cipolla R. Multi-task learning using uncertainty to weigh losses for scene geometry and semantics[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2018: 7482-7491.
- [5]?Chen Z, Badrinarayanan V, Lee C Y, et al. Gradnorm: Gradient normalization for adaptive loss balancing in deep multitask networks[C]//International Conference on Machine Learning. PMLR, 2018: 794-803.
- [6]?Liu S, Johns E, Davison A J. End-to-end multi-task learning with attention[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2019: 1871-1880.
- [7]?Yu T, Kumar S, Gupta A, et al. Gradient surgery for multi-task learning[J]. arXiv preprint arXiv:2001.06782, 2020.
- [8]?Wang Z, Tsvetkov Y, Firat O, et al. Gradient vaccine: Investigating and improving multi-task optimization in massively multilingual models[J]. arXiv preprint arXiv:2010.05874, 2020.








